disparity
(Not recommended) Disparity map between stereo images
disparity is not recommended. Use disparityBM or disparitySGM instead. For more information, see Compatibility Considerations
Description
disparityMap = disparity(I1,I2)disparityMap, for a pair of stereo
images, I1 and I2.
disparityMap = disparity(I1,I2,Name,Value)Name,Value pair arguments.
Examples
Compute Disparity Map for a Pair of Stereo Images
Load the images and convert them to grayscale.
I1 = imread('scene_left.png'); I2 = imread('scene_right.png');
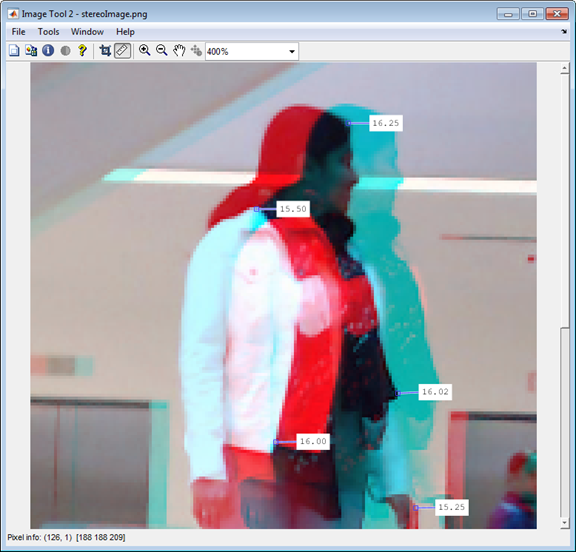
Show stereo anaglyph. Use red-cyan stereo glasses to view image in 3-D.
figure
imshow(stereoAnaglyph(I1,I2));
title('Red-cyan composite view of the stereo images');
Compute the disparity map.
disparityRange = [-6 10]; disparityMap = disparity(rgb2gray(I1),rgb2gray(I2),'BlockSize',... 15,'DisparityRange',disparityRange);
Display the disparity map. For better visualization, use the disparity range as the display range for imshow.
figure
imshow(disparityMap,disparityRange);
title('Disparity Map');
colormap(gca,jet)
colorbar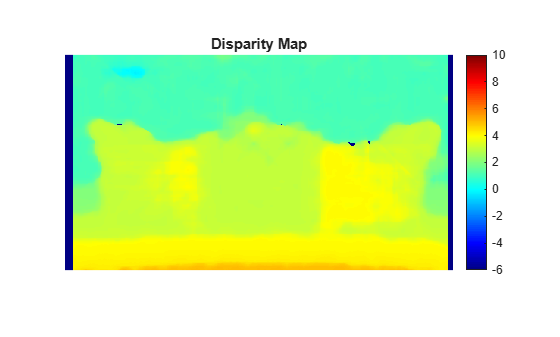
Input Arguments
I1 — Input image 1
M-by-N 2-D grayscale image
Input image referenced as I1 corresponding to
camera 1, specified in 2-D grayscale. The stereo images,
I1 and I2, must be rectified
such that the corresponding points are located on the same rows. You can
perform this rectification with the rectifyStereoImages
function.
You can improve the speed of the function by setting the class of
I1 and I2 to
uint8, and the number of columns to be divisible by
4. Input images I1 and I2 must
be real, finite, and nonsparse. They must be the same class.
Data Types: uint8 | uint16 | int16 | single | double
I2 — Input image 2
M-by-N 2-D grayscale image
Input image referenced as I2 corresponding to camera
2, specified in 2-D grayscale. The input images must be rectified such that
the corresponding points are located on the same rows. You can improve the
speed of the function by setting the class of I1 and
I2 to uint8, and the number of
columns to be divisible by 4. Input images I1 and
I2 must be real, finite, and nonsparse. They must
be the same class.
Data Types: uint8 | uint16 | int16 | single | double
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: 'Method','BlockMatching', specifies
the 'Method' property be set to
'BlockMatching'.
Method — Disparity estimation algorithm
'SemiGlobal' (default) | 'BlockMatching'
Disparity estimation algorithm, specified as the comma-separated pair
consisting of 'Method' and either
'BlockMatching' or
'SemiGlobal'. The disparity function implements
the basic Block Matching [1] and the Semi-Global Block Matching [3] algorithms. In the 'BlockMatching' method, the
function computes disparity by comparing the sum of absolute differences
(SAD) of each block of pixels in the image. In the
'SemiGlobal' matching method, the function
additionally forces similar disparity on neighboring blocks. This
additional constraint results in a more complete disparity estimate than
in the 'BlockMatching' method.
The algorithms perform these steps:
Compute a measure of contrast of the image by using the Sobel filter.
Compute the disparity for each pixel in
I1.Mark elements of the disparity map,
disparityMap, that were not computed reliably. The function uses –realmax('single') to mark these elements.
DisparityRange — Range of disparity
[0 64] (default) | two-element vector
Range of disparity, specified as the comma-separated pair consisting
of 'DisparityRange' and a two-element vector. The
two-element vector must be in the format
[MinDisparity, MaxDisparity].
Both elements must be an integer and can be negative.
MinDisparity and MaxDisparity
must be in the range [-image width, image
width]. The difference between
MaxDisparity and MinDisparity
must be divisible by 16. DisparityRange must be real, finite, and nonsparse. If
the camera used to take I1 was to the right of the
camera used to take I2, then
MinDisparity must be negative.
The disparity range depends on the distance between the two cameras
and the distance between the cameras and the object of interest.
Increase the DisparityRange when the cameras are
far apart or the objects are close to the cameras. To determine a
reasonable disparity for your configuration, display the stereo anaglyph
of the input images in the Image Viewer app and use the
Distance tool to measure distances between pairs of corresponding
points. Modify the MaxDisparity to correspond to the
measurement.
BlockSize — Square block size
15 (default) | odd integer
Square block size, specified as the comma-separated pair consisting of
'BlockSize' and an odd integer in the range
[5,255]. This value sets the width for the square block size. The
function uses the square block of pixels for comparisons between
I1 and I2. BlockSize must be real, finite, and
nonsparse.
ContrastThreshold — Contrast threshold range
0.5 (default) | scalar value
Contrast threshold range, specified as the comma-separated pair
consisting of 'ContrastThreshold' and a scalar
value in the range (0,1]. The contrast threshold defines an acceptable
range of contrast values. Increasing this parameter results in fewer
pixels being marked as unreliable.ContrastThreshold must be real, finite, and
nonsparse.
UniquenessThreshold — Minimum value of uniqueness
15 (default) | non-negative integer
Minimum value of uniqueness, specified as the comma-separated pair
consisting of 'UniquenessThreshold' and a
nonnegative integer. Increasing this parameter results in the function
marking more pixels unreliable. When the uniqueness value for a pixel is
low, the disparity computed for it is less reliable. Setting the
threshold to 0 disables uniqueness thresholding.
UniquenessThreshold must be real,
finite, and nonsparse.
The function defines uniqueness as a ratio of the optimal disparity estimation and the less optimal disparity estimation. For example:
| Let K be the best estimated disparity, and let V be the corresponding SAD (Sum of Absolute Difference) value. |
| Consider V as the smallest SAD value over the whole disparity range, and v as the smallest SAD value over the whole disparity range, excluding K, K-1, and K+1. |
If v < V *
(1+0.01*UniquenessThreshold), then the
function marks the disparity for the pixel as
unreliable. |
DistanceThreshold — Maximum distance for left-to-right image checking
[] (disabled) (default) | non-negative integer
Maximum distance for left-to-right image checking between two points,
specified as the comma-separated pair consisting of
'DistanceThreshold' and a nonnegative integer.
Increasing this parameter results in fewer pixels being marked as
unreliable. Conversely, when you decrease the value of the distance
threshold, you increase the reliability of the disparity map. You can
set this parameter to an empty matrix [] to disable
it. DistanceThreshold must be real,
finite, and nonsparse.
The distance threshold specifies the maximum distance between a point
in I1 and the same point found from
I2. The function finds the distance and marks
the pixel in the following way:
| Let p1 be a point in image I1. |
| Step 1: The function searches for point p1’s best match in image I2 (left-to-right check) and finds point p2. |
| Step 2: The function searches for p2’s best match in image I1 (right-to-left check) and finds point p3. |
If the search returns a distance between
p1 and
p3 greater than
DistanceThreshold, the
function marks the disparity for the point
p1 as
unreliable. |
TextureThreshold — Minimum texture threshold
0.0002 (default) | scalar value
Minimum texture threshold, specified as the comma-separated pair
consisting of 'TextureThreshold' and a scalar value
in the range [0, 1). The texture threshold defines the minimum texture
value for a pixel to be reliable. The lower the texture for a block of
pixels, the less reliable the computed disparity is for the pixels.
Increasing this parameter results in more pixels being marked as
unreliable. You can set this parameter to 0 to
disable it. This parameter applies only when you set
Method to
'BlockMatching'.
The texture of a pixel is defined as the sum of the saturated contrast
computed over the BlockSize-by-BlockSize
window around the pixel. The function considers the disparity computed
for the pixel unreliable and marks it, when the texture falls below the
value defined by:
Texture < X*
TextureThreshold *
BlockSize2
I1 and
I2.
TextureThreshold must be real,
finite, and nonsparse.
Output Arguments
Tips
If your resulting disparity map looks noisy, try modifying the
DisparityRange. The disparity range depends on the distance
between the two cameras and the distance between the cameras and the object of interest.
Increase the DisparityRange when the cameras are far apart or the
objects are close to the cameras. To determine a reasonable disparity for your
configuration, display the stereo anaglyph of the input images in the Image Viewer app and use the Distance tool to measure distances between pairs
of corresponding points. Modify the MaxDisparity to correspond to the
measurement.
References
[1] Konolige, K., Small Vision Systems: Hardware and Implementation, Proceedings of the 8th International Symposium in Robotic Research, pages 203-212, 1997.
[2] Bradski, G. and A. Kaehler, Learning OpenCV : Computer Vision with the OpenCV Library, O'Reilly, Sebastopol, CA, 2008.
[3] Hirschmuller, H., Accurate and Efficient Stereo Processing by Semi-Global Matching and Mutual Information, International Conference on Computer Vision and Pattern Recognition, 2005.
Extended Capabilities
Version History
Introduced in R2011bYou can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)