Modeling and Simulating Advanced Catalysts to Reduce Non-Road Vehicle Emissions
By Tim Watling, Johnson Matthey
Regulatory agencies worldwide are enforcing increasingly stringent emissions requirements for tractors, excavators, and other non-road, diesel-powered machinery. To help meet these requirements, manufacturers use sophisticated aftertreatment systems that include catalysts designed specifically for non-road vehicles. Designing these systems using physical prototypes is both costly and time-consuming not only because all the parts need to be manufactured, but also because each catalyst must be operated for a lengthy period, or at least artificially aged to represent this period, before it can be evaluated. The vehicle or machine must meet the emissions targets at end of useful life, which is defined in the legislation as being between 3000 and 10,000 hours of operation, depending on engine power and application. While laboratory-based accelerated aging methods can reduce the time required to, say 200 hours, this still represents a considerable period of time.
At Johnson Matthey, we use MATLAB® and Simulink® to identify the most promising designs before committing to a prototype. We have developed a complete aftertreatment system model in Simulink that incorporates optimized MATLAB models of individual catalyst components.
Simulations in MATLAB and Simulink enable us to understand the complex interactions that take place within a catalyst, perform sensitivity analysis to see which parameters have the greatest effect on the output, and make design tradeoffs based on the results. By simulating the Simulink model for various drive cycles, we can quickly and inexpensively evaluate multiple design options. We also use the model to systematically check configurations and parameter ranges to find the optimal design. As a result, we need far fewer aftertreatment system prototypes.
Non-Road Catalyst Design Challenges
Catalysts are used in engines in a wide array of applications, including generators, passenger cars, and mining, agricultural, and construction equipment. While the basic principles of catalyst design remain consistent across applications, optimizing catalyst designs for non-road vehicles introduces some unique challenges.
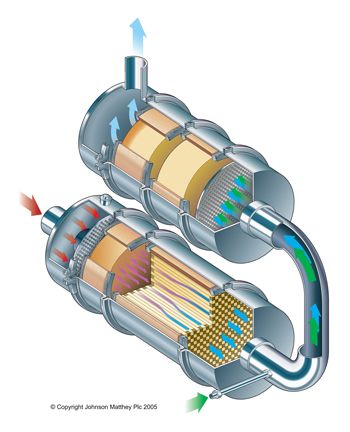
Catalysts for non-road vehicles are produced in much smaller numbers than catalysts for passenger vehicles, which means building fewer prototypes to minimize development costs. In addition, passenger vehicle catalysts (Figure 1) can be designed and optimized for a specific vehicle, which means that many aspects of the design, including the distance of the catalyst from the engine, are known well in advance. This is not the case for non-road engines.

An obvious solution to the challenge is simulation. However, simulating catalysts for non-road vehicles presents its own difficulties. Unlike their stationary counterparts—including engines for backup power generators—engines in non-road vehicles have a wide range of operating conditions. A tractor pulling a plow, for example, could be tilling a field or merely driving down the road. Simulations must take into account changes in flow rate, variations in temperature, and other transients to maintain accuracy across the full range of conditions under which the catalyst will operate.
Modeling Catalyst Components in MATLAB
To satisfy emissions regulations, a complete aftertreatment system for a diesel engine must remove carbon monoxide, unreacted hydrocarbons, nitrogen oxides (NOX), and particulate matter. As a result, a complete Johnson Matthey aftertreatment system comprises a diesel oxidation catalyst (DOC), a diesel particulate filter (DPF), an ammonia selective catalytic reduction (NH3 SCR) catalyst, and an ammonia slip catalyst (ASC) (Figure 2).
We created MATLAB models for each of these components. The models capture a complex combination of interrelated physical processes and kinetics. The physical processes include gas flows, as well as heat and mass transfer within the catalyst. The kinetics describe the rate at which chemical reactions take place, and show how the rate varies according to temperature and gas composition.
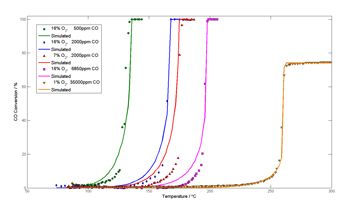
To develop a catalyst model we start with equations that describe the physics of the system, including energy and mass balances for the gas and solid (catalyst) phases, together with equations describing the heat and mass transport between these phases. We then run experiments in the lab that enable us to accurately measure the catalyst’s output while precisely controlling input and catalyst parameters. For example, we measure carbon monoxide conversion as a function of temperature for various gas mixtures (Figure 3).
To optimize model accuracy, we fit the parameters of our rate equations to the measured data using a genetic algorithm solver from Global Optimization Toolbox. After building prototypes of the catalyst components, we verify the output of the model against measurements taken from the actual component, and adjust the model as necessary.
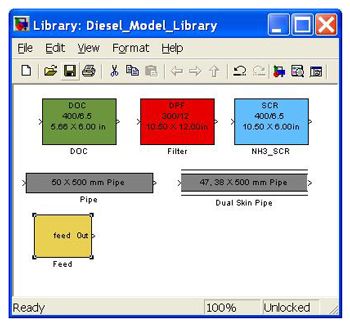
Each MATLAB component is implemented as an S-Function block in a Simulink library (Figure 4). In addition to the catalyst component models, the library includes a heat loss model for an exhaust pipe, a heat loss model for a dual skin pipe, and a feed block. The feed block provides gas flow, temperature, and other input to the Simulink aftertreatment system model based on drive cycles used by regulatory agencies, including the Non-Road Transient Cycle (NRTC). We obtain data for the feed block by capturing engine exhaust data from a real diesel engine as it executes the drive cycle.
Simulating Complete Aftertreatment Systems
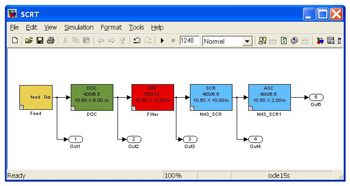
We rapidly assemble models of complete aftertreatment systems from the catalyst library blocks (Figure 5). This takes just a few minutes, far less time than it would take to build the real system. We can configure any block by setting its length, diameter, initial temperature, initial soot loading (for a filter model), precious metal loading, and other parameters.
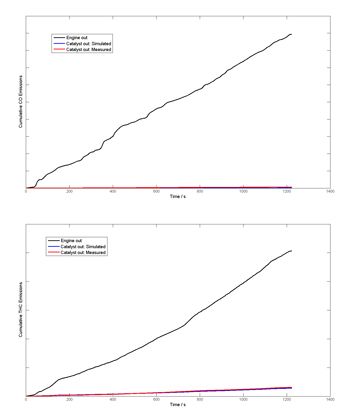
We run simulations in Simulink to evaluate the effectiveness of various system configurations and parameters for any given drive cycle. We can examine the intermediate output at any point in the chain. For example, we may plot simulated carbon monoxide and total hydrocarbon (THC) emissions for the first stage and compare the results with measured data to verify that stage of the model (Figure 6).
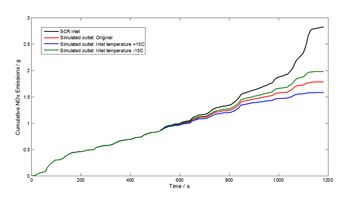
In some cases, our customer's design requirements are flexible—for example, they can raise the inlet temperature of the catalyst by moving it closer to the engine or by changing the calibration of the engine. To evaluate design alternatives, we run multiple simulations of the drive cycle, varying the inlet temperature for each simulation, and plot the results (Figure 7). The customer can then make an informed decision about where to place the catalyst. Often, we automate the multiple simulation runs with a MATLAB script that programmatically adjusts the key parameters in the Simulink model for each run, initiates the simulation, and captures the results for analysis.
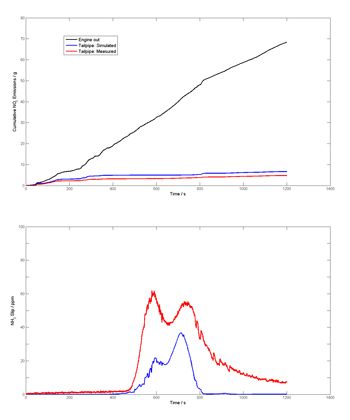
Intermediate results are useful for validation, but we are most interested in the output at the tailpipe, which for the model shown in Figure 5 is the output of the ASC. Via simulation, we measure the cumulative CO, THC, and NOX emissions, as well as NH3 slip, at the tailpipe to assess the overall effectiveness of the aftertreatment system (Figure 8).
When we do build a prototype, we compare its measured output with simulation output to verify the model. We can then use the model and simulations to fine-tune the prototype before it goes into production.
Why We Chose MATLAB over Custom Process Modeling Packages
Before using MATLAB and Simulink to model catalysts, engineers at Johnson Matthey tried using a commercial software package for developing custom process models. The models that we developed with this package were not flexible enough to handle scenarios we encountered regularly. The solvers, for example, were generally sufficient for steady-state conditions and constant temperatures but could not handle the transient nature of the inputs that we deal with, including temperature ranges and variation in the gas mixtures coming into the catalyst. With this package, we could not change the source code to make it more accurate or to overcome problems such as the simulation failing to converge.
With MATLAB, in contrast, we write our own equations and algorithms, giving us full control over the entire model. We know exactly how the model works and can easily identify the source of any discrepancy between the model output and measured data from a real catalyst. The ability to integrate components in a Simulink system-level model and run time–based simulations saves time and cost. Another advantage of developing our own system in MATLAB and Simulink is that we can capture the organizational knowledge and expertise accumulated by Johnson Matthey engineers rather than relying on another company’s one-size-fits-all solution.
Published 2012 - 92054v00