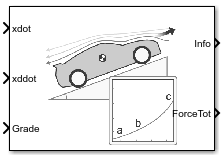
Vehicle Body Total Road Load
Vehicle motion using coast-down testing coefficients
Libraries:
Powertrain Blockset /
Vehicle Dynamics
Vehicle Dynamics Blockset /
Vehicle Body
Description
The Vehicle Body Total Road Load block implements a one degree-of-freedom (1DOF) rigid vehicle model using coast-down testing coefficients. You can use this block in a vehicle model to represent the load that the driveline and chassis applies to a transmission or engine. It is suitable for system-level performance, component sizing, fuel economy, or drive cycle tracking studies. The block calculates the dynamic powertrain load with minimal parameterization or computational cost.
You can configure the block for kinematic, force, or total power input.
Kinematic — Block uses the vehicle longitudinal velocity and acceleration to calculate the tractive force and power.
Force — Block uses the tractive force to calculate the vehicle longitudinal displacement and velocity.
Power — Block uses the engine or transmission power to calculate the vehicle longitudinal displacement and velocity.
Dynamics
To calculate the total road load acting on the vehicle, the block implements this equation.
To determine the coefficients a, b, and c, you can use a test procedure similar to the one described in Road Load Measurement and Dynamometer Simulation Using Coastdown Techniques. You can also use Simulink® Design Optimization™ to fit the coefficients to measured data (see Estimate Vehicle Drag Coefficients by Coast-Down Testing (Simulink Design Optimization)).
To calculate the vehicle motion, the block uses Newton’s law for rigid bodies.
Total power input is a product of the total force and longitudinal velocity. Power due to road and gravitational forces is a product of the road force and longitudinal velocity.
Power Accounting
For the power accounting, the block implements these equations.
| Bus Signal | Description | Variable | Equations | ||
|---|---|---|---|---|---|
|
|
| Externally applied force power | PFxExt | |
|
| PwrFxDrag | Drag force power | PD | ||
|
| wrStoredGrvty | Rate change in gravitational potential energy | Pg | ||
PwrStoredxdot | Rate in change of longitudinal kinetic energy | Pxdot | |||
The equations use these variables.
| a | Steady-state rolling resistance coefficient |
| b | Viscous driveline and rolling resistance coefficient |
| c | Aerodynamic drag coefficient |
| g | Gravitational acceleration |
| x | Vehicle longitudinal displacement with respect to ground, in the vehicle-fixed frame |
Vehicle longitudinal velocity with respect to ground, in the vehicle-fixed frame | |
Vehicle longitudinal acceleration with respect to ground, vehicle-fixed frame | |
| m | Vehicle body mass |
| Θ | Road grade angle |
| Ftotal | Total force acting on vehicle |
| Froad | Resistive road load due to losses and gravitational load |
| Ptotal | Total tractive input power |
| Proad | Total power due to losses and gravitational load |
Vehicle vertical velocity along the vehicle-fixed
|
Ports
Input
Output
Parameters
References
[1] Gillespie, Thomas. Fundamentals of Vehicle Dynamics. Warrendale, PA: Society of Automotive Engineers (SAE), 1992.
[2] Light Duty Vehicle Performance And Economy Measure Committee. Road Load Measurement and Dynamometer Simulation Using Coastdown Techniques. Standard J1263_201003. SAE International, March 2010.
Extended Capabilities
Version History
Introduced in R2017a