TuningGoal.ConicSector
Sector bound for control system tuning
Description
Use TuningGoal.ConicSector to create a conic sector bound for
control system tuning.
A conic sector bound is a restriction on the output trajectories of a system. If for all nonzero input trajectories u(t), the output trajectory z(t) = (Hu)(t) of a linear system H satisfies:
for all T ≥ 0, then the output trajectories of H lie in the conic sector described by the symmetric indefinite matrix Q. Selecting different Q matrices imposes different conditions on the system response.
When tuning a control system with systune, use TuningGoal.ConicSector to restrict the output trajectories
of the response between specified inputs and outputs to a specified sector. For more
information about sector bounds, see About Sector Bounds and Sector Indices.
Creation
Description
Req = TuningGoal.ConicSector(
creates a tuning goal for restricting the response
H(s) from inputs
inputname,outputname,Q)inputname to outputs
outputname to the conic sector specified by the
symmetric matrix Q. The tuning goal constrains
H such that its trajectories
z(t) =
(Hu)(t) satisfy:
for all T ≥ 0. (See About Sector Bounds and Sector Indices.) The matrix Q must have as many negative
eigenvalues as there are inputs in H.
To specify frequency-dependent sector bounds, set Q
to an LTI model that satisfies Q(s)T
= Q(–s).
Input Arguments
Input signals for the tuning goal, specified as a character vector or, for multiple-input tuning goals, a cell array of character vectors.
If you are using the tuning goal to tune a Simulink® model of a control system, then
inputnamecan include:Any model input.
Any linear analysis point marked in the model.
Any linear analysis point in an
slTuner(Simulink Control Design) interface associated with the Simulink model. UseaddPoint(Simulink Control Design) to add analysis points to theslTunerinterface. UsegetPoints(Simulink Control Design) to get the list of analysis points available in anslTunerinterface to your model.
For example, suppose that the
slTunerinterface contains analysis pointsu1andu2. Use'u1'to designate that point as an input signal when creating tuning goals. Use{'u1','u2'}to designate a two-channel input.
If you are using the tuning goal to tune a generalized state-space (
genss) model of a control system, theninputnamecan include:Any input of the
genssmodelAny
AnalysisPointlocation in the control system model
For example, if you are tuning a control system model,
T, theninputnamecan be any input name inT.InputName. Also, ifTcontains anAnalysisPointblock with a location namedAP_u, theninputnamecan include'AP_u'. UsegetPointsto get a list of analysis points available in agenssmodel.If
inputnameis anAnalysisPointlocation of a generalized model, the input signal for the tuning goal is the implied input associated with theAnalysisPointblock:
For more information about analysis points in control system models, see Mark Signals of Interest for Control System Analysis and Design.
Output signals for the tuning goal, specified as a character vector or, for multiple-output tuning goals, a cell array of character vectors.
If you are using the tuning goal to tune a Simulink model of a control system, then
outputnamecan include:Any model output.
Any linear analysis point marked in the model.
Any linear analysis point in an
slTuner(Simulink Control Design) interface associated with the Simulink model. UseaddPoint(Simulink Control Design) to add analysis points to theslTunerinterface. UsegetPoints(Simulink Control Design) to get the list of analysis points available in anslTunerinterface to your model.
For example, suppose that the
slTunerinterface contains analysis pointsy1andy2. Use'y1'to designate that point as an output signal when creating tuning goals. Use{'y1','y2'}to designate a two-channel output.
If you are using the tuning goal to tune a generalized state-space (
genss) model of a control system, thenoutputnamecan include:Any output of the
genssmodelAny
AnalysisPointlocation in the control system model
For example, if you are tuning a control system model,
T, thenoutputnamecan be any output name inT.OutputName. Also, ifTcontains anAnalysisPointblock with a location namedAP_u, thenoutputnamecan include'AP_u'. UsegetPointsto get a list of analysis points available in agenssmodel.If
outputnameis anAnalysisPointlocation of a generalized model, the output signal for the tuning goal is the implied output associated with theAnalysisPointblock:
For more information about analysis points in control system models, see Mark Signals of Interest for Control System Analysis and Design.
Q — Output signals for tuning goal
matrix | LTI model object
Sector geometry, specified as:
A matrix, for constant sector geometry.
Qis a symmetric square matrix that isnyon a side, wherenyis the number of signals inoutputname. The matrixQmust be indefinite to describe a well-defined conic sector. An indefinite matrix has both positive and negative eigenvalues. In particular,Qmust have as many negative eigenvalues as there are input channels specified ininputname(the size of the vector input signal u(t)).An LTI model, for frequency-dependent sector geometry.
Qsatisfies Q(s)T = Q(–s). In other words, Q(s) evaluates to a Hermitian matrix at each frequency.
For more information, see About Sector Bounds and Sector Indices.
Properties
Examples
Conic Sector Goal
Create a tuning goal that restricts the response from an input or analysis point 'u' to an output or analysis point 'y' in a control system to the following sector:
The Q matrix for this sector is given by:
a = 0.1; b = 10; Q = [1 -(a+b)/2 ; -(a+b)/2 a*b];
Use this Q matrix to create the tuning goal.
TG = TuningGoal.ConicSector('u','y',Q)
TG =
ConicSector with properties:
SectorMatrix: [2x2 double]
Regularization: 0
Focus: [0 Inf]
Input: {'u'}
Output: {'y'}
Models: NaN
Openings: {0x1 cell}
Name: ''
Set properties to further configure the tuning goal. For example, suppose the control system model has an analysis point called 'OuterLoop', and you want to enforce the tuning goal with the loop open at that point.
TG.Openings = 'OuterLoop';Before or after tuning, use viewGoal to visualize the tuning goal.
viewGoal(TG)
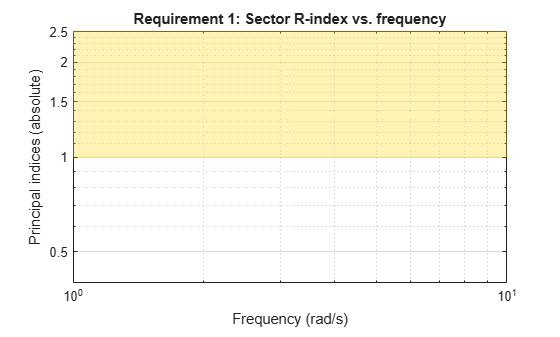
The goal is met when the relative sector index R < 1 at all frequencies. The shaded area represents the region where the goal is not met. When you use this requirement to tune a control system CL, viewGoal(TG,CL) shows R for the specified inputs and outputs on this plot, enabling you to identify frequency ranges in which the goal is not met, and by how much.
Constrain Input and Output Trajectories to Conic Sector
Consider the following control system.
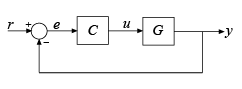
Suppose that the signal u is marked as an analysis point in a Simulink model or genss model of the control system. Suppose also that G is the closed-loop transfer function from u to y. Create a tuning goal that constrains all I/O trajectories {u(t),y(t)} of G to satisfy:
for all . For this example, use sector matrix that imposes input passivity with index 0.5.
nu = 0.5; Q = [0 -1;-1 2*nu];
Constraining the I/O trajectories of G is equivalent to restricting the output trajectories of to the sector defined by:
(See About Sector Bounds and Sector Indices for more details about this equivalence.) To specify this constraint, create a tuning goal that constrains the transfer function , which the transfer function from input to outputs .
TG = TuningGoal.ConicSector('u',{'y';'u'},Q);
When you specify the same signal 'u' as both input and output, the conic sector tuning goal sets the corresponding transfer function to the identity. Therefore, the transfer function constrained by TG is as intended. This treatment is specific to the conic sector tuning goal. For other tuning goals, when the same signal appears in both inputs and outputs, the resulting transfer function is zero in the absence of feedback loops, or the complementary sensitivity at that location otherwise. This result occurs because when the software processes analysis points, it assumes the input is injected after the output. See Mark Signals of Interest for Control System Analysis and Design for more information about how analysis points work.
Tips
The conic sector tuning goal requires that be square and minimum phase, where H(s) is the transfer function between the specified inputs and outputs, and W2 spans the negative invariant subspace of the sector matrix, Q:
(See Algorithms.) This means that the stabilized dynamics for this goal are not the poles of H, but rather the transmission zeros of . The
MinDecayandMaxRadiusoptions ofsystuneOptionscontrol the bounds on these implicitly constrained dynamics. If the optimization fails to meet the default bounds, or if the default bounds conflict with other requirements, usesystuneOptionsto change these defaults.
Algorithms
Let
be an indefinite factorization of Q. When is square and minimum phase, then the time-domain sector bound on trajectories z(t) = Hu(t),
is equivalent to the frequency-domain sector condition,
for all frequencies. The TuningGoal.ConicSector goal uses this
equivalence to convert the time-domain characterization into a frequency-domain
condition that systune can handle in the same way it handles gain
constraints. To secure this equivalence, TuningGoal.ConicSector also
makes minimum phase by making all its zeros stable.
For sector bounds, the R-index plays the same role as the peak gain does for gain constraints (see About Sector Bounds and Sector Indices). The condition
is satisfied at all frequencies if and only if the R-index is less
than one. The viewGoal plot for
TuningGoal.ConicSector shows the R-index value
as a function of frequency (see sectorplot).
When you tune a control system using a TuningGoal object to specify
a tuning goal, the software converts the tuning goal into a normalized scalar value
f(x), where x is the vector
of free (tunable) parameters in the control system. The software then adjusts the
parameter values to minimize f(x) or to drive
f(x) below 1 if the tuning goal is a hard
constraint.
For the sector bound
TuningGoal.ConicSector uses the objective function
given by:
R is the sector-bound R-index (see getSectorIndex for details).
The dynamics of H affected by the minimum-phase condition are the
stabilized dynamics for this tuning goal. The
MinDecay and MaxRadius options of
systuneOptions control the bounds on these implicitly
constrained dynamics. If the optimization fails to meet the default bounds, or if the
default bounds conflict with other requirements, use systuneOptions to change these defaults.
Version History
Introduced in R2016b
See Also
systune | systune (for slTuner) (Simulink Control Design) | getSectorIndex | viewGoal | evalGoal | slTuner (Simulink Control Design)
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)