randrot
Uniformly distributed random rotations
Description
R = randrot
R = randrot([m1,...,mN])m1-by-...-by-mN array of random unit
quaternions, where m1,…, mN indicate the size of
each dimension. For example, randrot([3,4]) returns a 3-by-4 matrix of
random unit quaternions.
Examples
Matrix of Random Rotations
Generate a 3-by-3 matrix of uniformly distributed random rotations.
r = randrot(3)
r = 3x3 quaternion array
0.17446 + 0.59506i - 0.73295j + 0.27976k 0.69704 - 0.060589i + 0.68679j - 0.19695k 0.35191 + 0.74478i + 0.52322j - 0.21842k
0.21908 - 0.89875i - 0.298j + 0.23548k -0.049744 + 0.59691i + 0.56459j + 0.56786k 0.17527 - 0.46955i + 0.52986j - 0.68414k
0.6375 + 0.49338i - 0.24049j + 0.54068k 0.2979 - 0.53568i + 0.31819j + 0.72323k -0.30189 - 0.22864i - 0.83159j + 0.40626k
Create Uniform Distribution of Random Rotations
Create a vector of 500 random quaternions. Use rotatepoint to visualize the distribution of the random rotations applied to point (1, 0, 0).
q = randrot(500,1);
pt = rotatepoint(q, [1 0 0]);
figure
scatter3(pt(:,1), pt(:,2), pt(:,3))
axis equal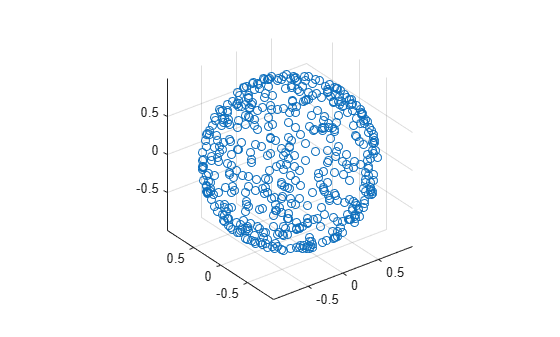
Input Arguments
Output Arguments
References
[1] Shoemake, K. "Uniform Random Rotations." Graphics Gems III (K. David, ed.). New York: Academic Press, 1992.
Extended Capabilities
Version History
Introduced in R2019a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)