forecast
Forecast identified model output
Syntax
Description
yf = forecast(sys,PastData,K)sys, K steps into the future using
past measured time-domain data, PastData.
PastData can be a timetable, a comma-separated
input/output matrix pair, or a time-domain iddata object.
forecast performs prediction into the future, in a time
range beyond the last instant of measured data. In contrast, the predict command predicts the
response of an identified model over the time span of measured data. Use
predict to determine if the predicted result matches
the observed response of an estimated model. If sys is a
good prediction model, consider using it with
forecast.
forecast(
plots the forecasted output. Use with any of the previous input argument
combinations.sys,PastData,K,___)
To change display options, right-click the plot to access the context menu. For example, to view the estimated standard deviation of the forecasted output, select Confidence Region from the context menu. For more details about the menu, see Tips.
Examples
Forecast Future Values of a Sinusoidal Signal
Forecast the values of a sinusoidal signal using an AR model.
Generate and plot data.
data = iddata(sin(0.1*[1:100])',[]); plot(data)
Fit an AR model to the sine wave.
sys = ar(data,2);
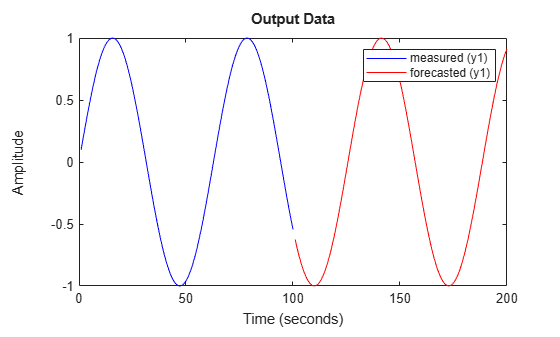
Forecast the values into the future for a given time horizon.
K = 100; p = forecast(sys,data,K);
K specifies the forecasting time horizon as 100 samples. p is the forecasted model response.
Plot the forecasted data.
plot(data,'b',p,'r'), legend('measured','forecasted')
Alternatively, plot the forecasted output using the syntax forecast(sys,data,K).
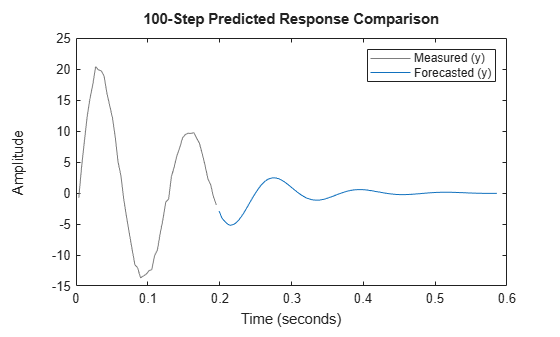
Forecast Response of Time Series Model
Obtain past data, and identify a time series model.
load sdata9 tt9 past_data = tt9.y(1:50); model = ar(tt9,4);
tt9 is an iddata object that contains measured output only.
model is an idpoly time series model.
Specify initial conditions for forecasting.
opt = forecastOptions('InitialCondition','e');
Plot the forecasted system response for a given time horizon.
K = 100; forecast(model,past_data,K,opt); legend('Measured','Forecasted')
Plot Forecasted Output With Specified Line Type
Obtain past data, and identify a time series model.
load iddata9 z9 past_data = z9.OutputData(1:50); model = ar(z9,4);
z9 is an iddata object that contains measured output only.
Plot the forecasted system response for a given time horizon as a red dashed line.
K = 100;
forecast(model,'r--',past_data,K);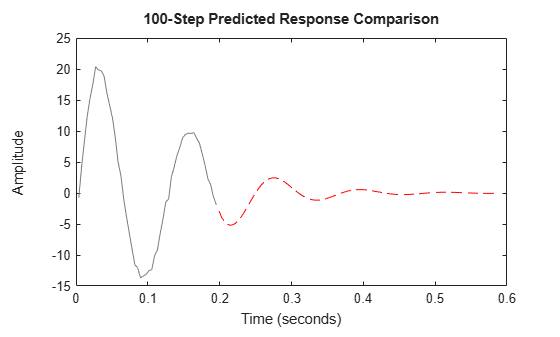
The plot also displays the past data by default. To change display options, right-click the plot to access the context menu. For example, to view the estimated standard deviation of the forecasted output, select Confidence Region from the context menu. To specify number of standard deviations to plot, double-click the plot and open the Property Editor dialog box. In the dialog box, in the Options tab, specify the number of standard deviations in Confidence Region for Identified Models. The default value is 1 standard deviation.
Forecast Model Response for Known Future Inputs
Obtain past data, future inputs, and an identified linear model.
load iddata1 z1 z1 = iddata(cumsum(z1.y),cumsum(z1.u),z1.Ts,'InterSample','foh'); past_data = z1(1:100); future_inputs = z1.u(101:end); sys = polyest(z1,[2 2 2 0 0 1],'IntegrateNoise',true);
z1 is an iddata object that contains integrated data. sys is an idpoly model. past_data contains the first 100 data points of z1.
future_inputs contains the last 200 data points of z1.
Forecast the system response into the future for a given time horizon and future inputs.
K = 200; [yf,x0,sysf,yf_sd,x,x_sd] = forecast(sys,past_data,K,future_inputs);
yf is the forecasted model response, and yf_sd is the standard deviation of the output. x0 is the estimated value for initial states, and sysf is the forecasting state-space model. Also returned are the state trajectory, x, and standard deviation of the trajectory, x_sd.
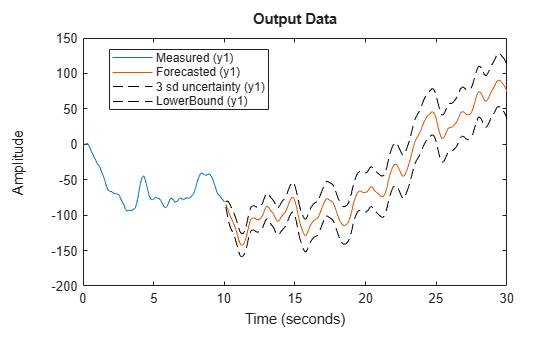
Plot the forecasted response.
UpperBound = iddata(yf.OutputData+3*yf_sd,[],yf.Ts,'Tstart',yf.Tstart); LowerBound = iddata(yf.OutputData-3*yf_sd,[],yf.Ts,'Tstart',yf.Tstart); plot(past_data(:,:,[]),yf(:,:,[]),UpperBound,'k--',LowerBound,'k--') legend({'Measured','Forecasted','3 sd uncertainty'},'Location','best')
Plot the state trajectory.
t = z1.SamplingInstants(101:end); subplot(3,1,1) plot(t,x(:,1),t,x(:,1)+3*x_sd(:,1),'k--',t,x(:,1)-3*x_sd(:,1),'k--') title('X_1') subplot(3,1,2) plot(t, x(:,2),t,x(:,2)+3*x_sd(:,2),'k--',t, x(:,2)-3*x_sd(:,2),'k--') title('X_2') subplot(3,1,3) plot(t,x(:,3),t,x(:,3)+3*x_sd(:,3),'k--',t, x(:,3)-3*x_sd(:,3),'k--') title('X_3')
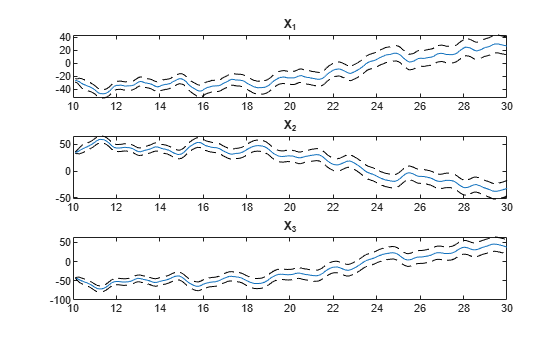
The response uncertainty does not grow over the forecasting time span because of the specification of future inputs.
Forecast Response of Multi-Output Nonlinear Time Series Model
Load data.
load('predprey2data'); z = iddata(y,[],0.1); set(z,'Tstart',0,'OutputUnit',{'Population (in thousands)',... 'Population (in thousands)'},'TimeUnit','Years');
z is a two output time-series data set (no inputs) from a 1-predator 1-prey population. The population exhibits a decline in predator population due to crowding. The data set contains 201 data samples covering 20 years of evolution.
The changes in the predator (y1) and prey (y2) population can be represented as:
The nonlinearity in the predator and prey populations can be fit using a nonlinear ARX model with custom regressors.
Use part of the data as past data.
past_data = z(1:100);
Specify the standard regressors.
na = [1 0; 0 1]; nb = []; nk = [];
Specify the custom regressors.
C = {{'y1(t-1)*y2(t-1)'};{'y1(t-1)*y2(t-1)','y2(t-1)^2'}};Estimate a nonlinear ARX model using past_data as estimation data.
sys = nlarx(past_data,[na nb nk],'idWaveletNetwork','CustomRegressors',C);
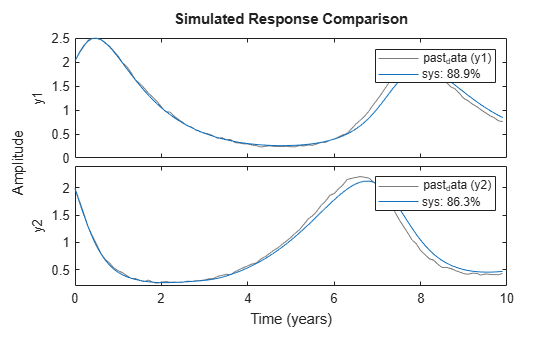
Compare the simulated output of sys with measured data to ensure it is a good fit.
compare(past_data,sys);
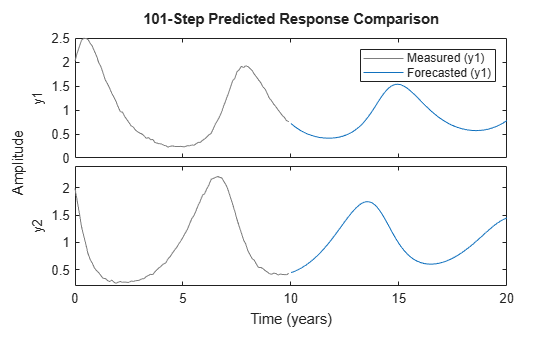
Plot the forecasted output of sys.
forecast(sys,past_data,101); legend('Measured','Forecasted');
Reproduce Forecasting Results by Simulation
Obtain past data, future inputs, and identified linear model.
load iddata3 z3 past_data = z3(1:100); future_inputs = z3.u(101:end); sys = polyest(z3,[2 2 2 0 0 1]);
Forecast the system response into the future for a given time horizon and future inputs.
K = size(future_inputs,1); [yf,x0,sysf] = forecast(sys,past_data,K,future_inputs);
yf is the forecasted model response, x0 is the estimated value for initial states, and sysf is the forecasting state-space model.
Simulate the forecasting state-space model with inputs, future_inputs, and initial conditions, x0.
opt = simOptions; opt.InitialCondition = x0; ys = sim(sysf,future_inputs(1:K),opt);
Plot the forecasted and simulated outputs.
t = yf.SamplingInstants; plot(t,yf.OutputData,'b',t,ys,'.r'); legend('Forecasted Output','Simulated Output')
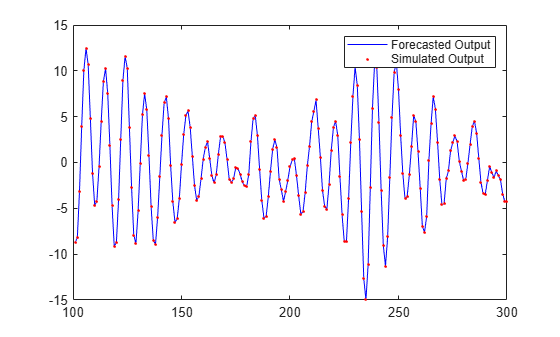
Simulation of forecasting model, sysf, with inputs, future_inputs, and initial conditions, x0, yields the forecasted output, yf.
Input Arguments
Output Arguments
Tips
Right-clicking the plot opens the context menu, where you can access the following options:
Systems — Select systems to view forecasted output. By default, the forecasted output of all systems is plotted.
Data Experiment — For multi-experiment data only. Toggle between data from different experiments.
Characteristics — View the following data characteristics:
Peak Value — View peak value of the data.
Mean Value — View mean value of the data.
Confidence Region — View the estimated standard deviation of the forecasted output. To specify number of standard deviations to plot, double-click the plot and open the Property Editor dialog box. Specify the number of standard deviations in the Options tab, in Confidence Region for Identified Models. The default value is
1standard deviation.The confidence region is not generated for nonlinear ARX and Hammerstein-Wiener models and models that do not contain parameter covariance information.
Show Past Data — Plot the past output data used for forecasting. By default, the past output data is plotted.
I/O Grouping — For datasets containing more than one input or output channel. Select grouping of input and output channels on the plot.
None — Plot input-output channels in their own separate axes.
All — Group all input channels together and all output channels together.
I/O Selector — For datasets containing more than one input or output channel. Select a subset of the input and output channels to plot. By default, all output channels are plotted.
Grid — Add grids to the plot.
Normalize — Normalize the y-scale of all data in the plot.
Full View — Return to full view. By default, the plot is scaled to full view.
Properties — Open the Property Editor dialog box to customize plot attributes.
Version History
Introduced in R2012aYou can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)