Derating Function
Compute derating factor
Libraries:
Motor Control Blockset /
Controls /
Controllers
Motor Control Blockset HDL Support /
Controls /
Controllers
Description
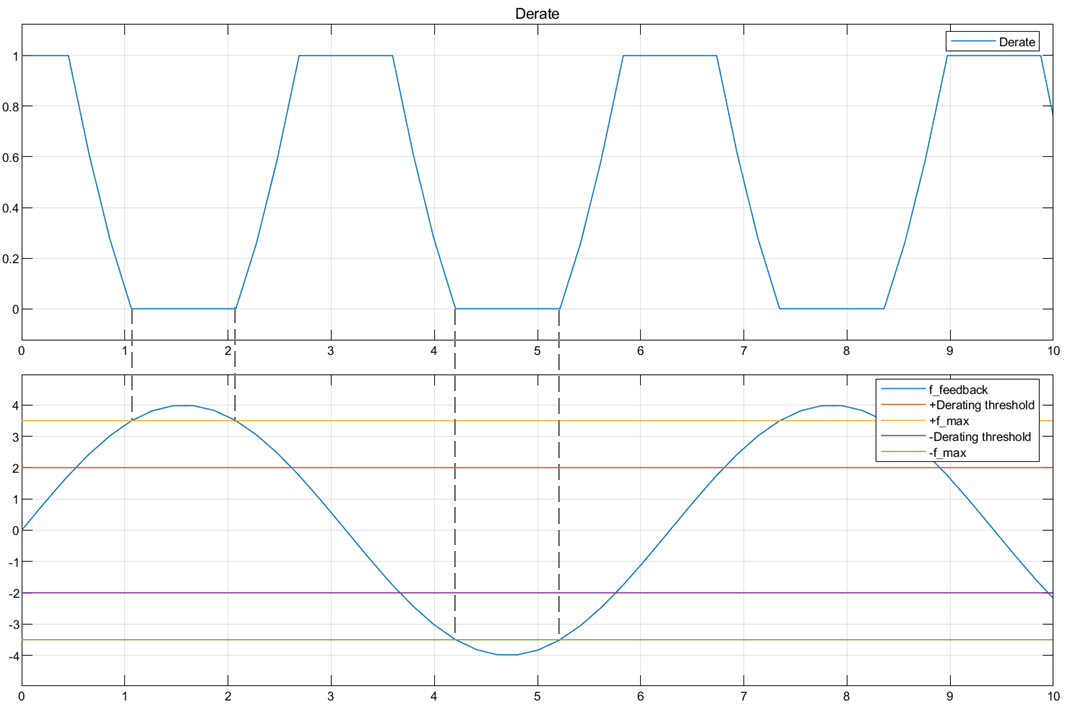
The Derating Function block generates the derating factor (y) according to the feedback (ffeedback) and maximum limit (fmax) values of the input reference signal.
The derating factor:
Remains equal to one when ffeedback lies between positive and negative values of the Derating threshold. The derating factor varies linearly outside this range according to ffeedback.
Remains equal to zero when the reference signal lies beyond (positive or negative) fmax.
Therefore, you can use the generated derating factor to derate a control signal after the reference signal crosses the specified Derating threshold.
This figure shows the block output when you use a sinusoidal wave as ffeedback.
Equations
The Derating threshold parameter, indicates the percentage of peak amplitude for the reference signal. The Derating threshold is 0.5 in the block output shown, which results in a threshold value of 2 (for the peak amplitude value of 4 for the sinusoidal reference signal).
This equation describes how the block computes the derating factor (y).
Examples

Field-Weakening Control (with MTPA) of PMSM
Implements the field-oriented control (FOC) technique to control the torque and speed of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which is obtained by a quadrature encoder sensor. For details about FOC, see Field-Oriented Control (FOC).
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2020a