Automated Driving Applications
You can use model predictive control (MPC) in automated driving applications to improve vehicle responsiveness while maintaining passenger comfort and safety. MPC has several features that are useful for automated driving, such as predicting vehicle behavior in the near future and explicitly handling constraints during optimization. For more information, see Automated Driving Using Model Predictive Control.
Blocks
| Adaptive Cruise Control System | Simulate adaptive cruise control using model predictive controller |
| Lane Keeping Assist System | Simulate lane-keeping assistance using adaptive model predictive controller |
| Path Following Control System | Simulate path-following control using adaptive model predictive controller |
| Vehicle Path Planner System | Plan collision-free path from initial pose to target pose (Since R2022b) |
Topics
MPC Driving Basics
- Automated Driving Using Model Predictive Control
You can design and simulate automated driving systems using MPC controllers.
Adaptive Cruise Control
- Adaptive Cruise Control System Using Model Predictive Control
Design an MPC controller that tracks a set velocity and maintains a safe distance from a lead vehicle by adjusting the longitudinal acceleration of an ego vehicle. - Adaptive Cruise Control with Sensor Fusion (Automated Driving Toolbox)
Implement an automotive adaptive cruise controller using sensor fusion.
Lane Keeping Assist
- Lane Keeping Assist System Using Model Predictive Control
Design an MPC controller that keeps an ego vehicle traveling along the center of a straight or curved road by adjusting the front steering angle. - Lane Keeping Assist with Lane Detection (Automated Driving Toolbox)
Simulate and generate code for an automotive lane keeping assist controller.
Lane Following
- Lane Following Using Nonlinear Model Predictive Control
Design a lane-following controller using nonlinear MPC with road curvature previewing. - Lane Following Control with Sensor Fusion and Lane Detection (Automated Driving Toolbox)
Simulate and generate code for an automotive lane-following controller. - Highway Lane Following (Automated Driving Toolbox)
Simulate a lane-following controller and monocular camera-based perception algorithm in the Unreal Engine® simulation environment.
Lane Changing
- Lane Change Assist Using Nonlinear Model Predictive Control
Design a lane-change controller using nonlinear MPC. - Highway Lane Change Planner and Controller (Automated Driving Toolbox)
Design and test the planner and controller components of a lane change maneuver system designed for highway driving.
Parking
- Plan Parallel Parking Path Using Multistage Nonlinear Model Predictive Control
You can plan a parking path for a vehicle using the Vehicle Path Planner System block. - Parking Valet Using Multistage Nonlinear Model Predictive Control
Design controller for parking garage valet using nonlinear model predictive control. - Parallel Parking Using Nonlinear Model Predictive Control
Design a parallel parking controller using nonlinear model predictive control. - Parallel Parking Using RRT Planner and MPC Tracking Controller
Automatically parallel park a vehicle by generating a path using the RRT star planner and tracking the trajectory using nonlinear model predictive control.
Related Information
- Applications (Automated Driving Toolbox)
Featured Examples

Truck Platooning with RoadRunner Scenario
Simulate truck platooning application, designed in Simulink®, with RoadRunner Scenario.
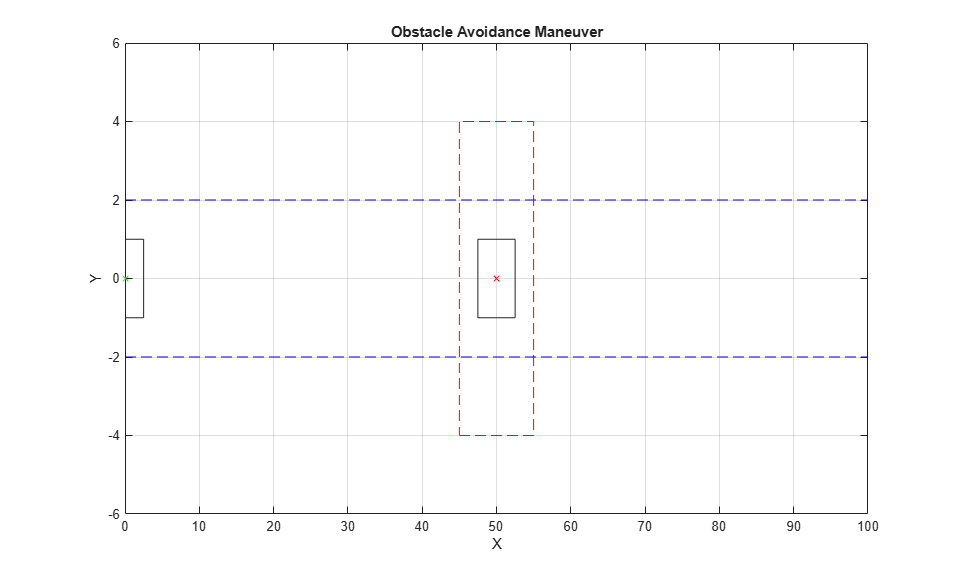
Obstacle Avoidance Using Adaptive Model Predictive Control
Use adaptive MPC to make a vehicle follow a reference velocity and avoid obstacles by updating the plant model and linear mixed input/output constraints at run time.

Traffic Light Negotiation
Design and test decision logic for negotiating a traffic light at an intersection.

Truck and Trailer Automatic Parking Using Multistage Nonlinear MPC
Use multistage nonlinear MPC to park a truck and trailer system in presence of static obstacles.

Parallel Parking of Truck-Trailer Using Multistage Nonlinear MPC
Parallel park a truck-trailer system using multistage nonlinear MPC controllers for path planning and trajectory tracking.