Pedestrian and Bicyclist Classification Using Deep Learning
This example shows how to classify pedestrians and bicyclists based on their micro-Doppler characteristics using a deep learning network and time-frequency analysis.
The movements of different parts of an object placed in front of a radar produce micro-Doppler signatures that can be used to identify the object. This example uses a convolutional neural network (CNN) to identify pedestrians and bicyclists based on their signatures.
This example trains the deep learning network using simulated data and then examines how the network performs at classifying two cases of overlapping signatures.
Synthetic Data Generation by Simulation
The data used to train the network is generated using backscatterPedestrian and backscatterBicyclist from Radar Toolbox™. These functions simulate the radar backscattering of signals reflected from pedestrians and bicyclists, respectively.
The helper function helperBackScatterSignals generates a specified number of pedestrian, bicyclist, and car radar returns. Because the purpose of the example is to classify pedestrians and bicyclists, this example considers car signatures as noise sources only. To get an idea of the classification problem to solve, examine one realization of a micro-Doppler signature from a pedestrian, a bicyclist, and a car. For each realization, the return signals have dimensions -by-, where is the number of fast-time samples and is the number of slow-time samples. See Radar Data Cube for more information.
% Set random number generation rng('default') % For reproducibility numPed = 1; % Number of pedestrian realizations numBic = 1; % Number of bicyclist realizations numCar = 1; % Number of car realizations [xPedRec,xBicRec,xCarRec,Tsamp] = helperBackScatterSignals(numPed,numBic,numCar);
The helper function helperDopplerSignatures computes the short-time Fourier transform (STFT) of a radar return to generate the micro-Doppler signature. To obtain the micro-Doppler signatures, use the helper functions to apply the STFT and a preprocessing method to each signal.
[SPed,T,F] = helperDopplerSignatures(xPedRec,Tsamp); [SBic,~,~] = helperDopplerSignatures(xBicRec,Tsamp); [SCar,~,~] = helperDopplerSignatures(xCarRec,Tsamp);
Plot the time-frequency maps for the pedestrian, bicyclist, and car realizations.
% Plot the first realization of objects figure subplot(1,3,1) imagesc(T,F,SPed(:,:,1)) ylabel('Frequency (Hz)') title('Pedestrian') axis square xy c = colorbar; c.Label.String = 'dB'; subplot(1,3,2) imagesc(T,F,SBic(:,:,1)) xlabel('Time (s)') title('Bicyclist') axis square xy c = colorbar; c.Label.String = 'dB'; subplot(1,3,3) imagesc(T,F,SCar(:,:,1)) title('Car') axis square xy c = colorbar; c.Label.String = 'dB';
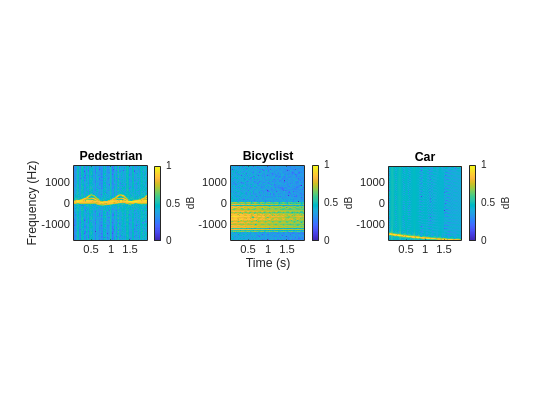
The normalized spectrograms (STFT absolute values) show that the three objects have quite distinct signatures. Specifically, the spectrograms of the pedestrian and the bicyclist have rich micro-Doppler signatures caused by the swing of arms and legs and the rotation of wheels, respectively. By contrast, in this example, the car is modeled as a point target with a rigid body, so the spectrogram of the car shows that the short-term Doppler frequency shift varies little, indicating little micro-Doppler effect.
Combining Objects
Classifying a single realization as a pedestrian or bicyclist is relatively simple, because the pedestrian and bicyclist micro-Doppler signatures are dissimilar. However, classifying multiple overlapping pedestrians or bicyclists, with the addition of Gaussian noise or car noise, is much more difficult.
If multiple objects exist in the detection region of the radar at the same time, the received radar signal is a summation of the detection signals from all the objects. As an example, generate the received radar signal for a pedestrian and bicyclist with Gaussian background noise.
% Configure Gaussian noise level at the receiver rx = phased.ReceiverPreamp('Gain',25,'NoiseFigure',10); xRadarRec = complex(zeros(size(xPedRec))); for ii = 1:size(xPedRec,3) xRadarRec(:,:,ii) = rx(xPedRec(:,:,ii) + xBicRec(:,:,ii)); end
Then obtain micro-Doppler signatures of the received signal by using the STFT.
[S,~,~] = helperDopplerSignatures(xRadarRec,Tsamp); figure imagesc(T,F,S(:,:,1)) % Plot the first realization axis xy xlabel('Time (s)') ylabel('Frequency (Hz)') title('Spectrogram of a Pedestrian and a Bicyclist') c = colorbar; c.Label.String = 'dB';
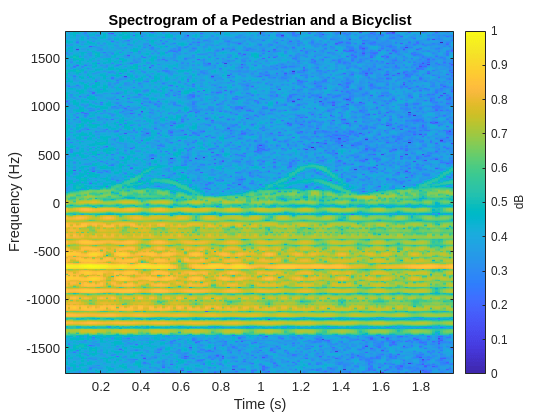
Because the pedestrian and bicyclist signatures overlap in time and frequency, differentiating between the two objects is difficult.
Generate Training Data
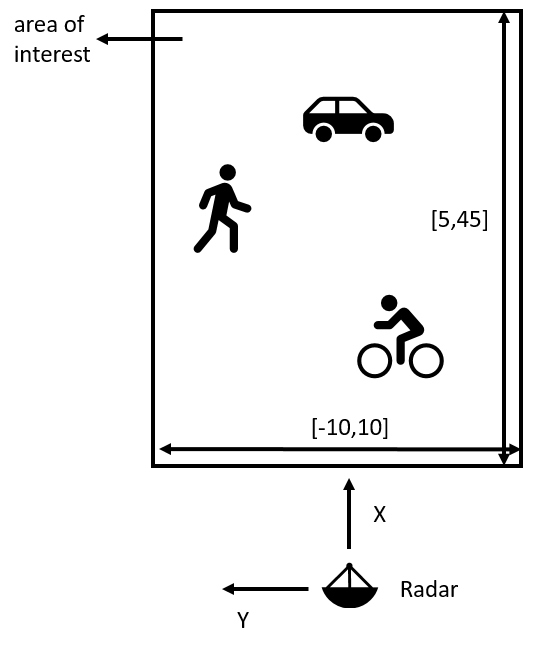
In this example, you train a CNN by using data consisting of simulated realizations of objects with varying properties—for example, bicyclists pedaling at different speeds and pedestrians with different heights walking at different speeds. Assuming the radar is fixed at the origin, in one realization, one object or multiple objects are uniformly distributed in a rectangular area of [5, 45] and [–10, 10] meters along the X and Y axes, respectively.
The other properties of the three objects that are randomly tuned are as follows:
1) Pedestrians
Height — Uniformly distributed in the interval of [1.5, 2] meters
Heading — Uniformly distributed in the interval of [–180, 180] degrees
Speed — Uniformly distributed in the interval of [0, 1.4h] meters/second, where
his the height value
2) Bicyclists
Heading — Uniformly distributed in the interval of [–180, 180] degrees
Speed — Uniformly distributed in the interval of [1, 10] meters/second
Gear transmission ratio — Uniformly distributed in the interval of [0.5, 6]
Pedaling or coasting — 50% probability of pedaling (coasting means that the cyclist is moving without pedaling)
3) Cars
Velocity — Uniformly distributed in the interval of [0, 10] meters/second along the X and Y directions
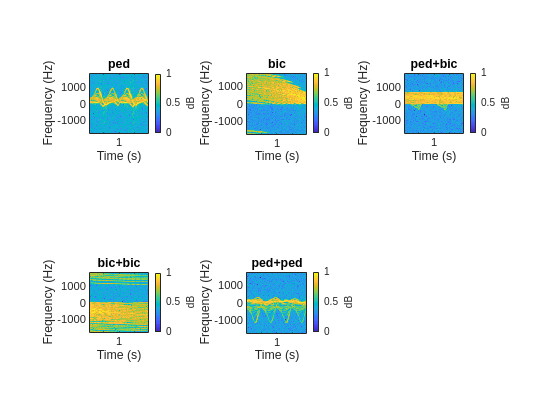
The inputs to the CNN are micro-Doppler signatures consisting of spectrograms expressed in decibels and normalized to [0, 1], as shown in this figure.

Radar returns originate from different objects and different parts of objects. Depending on the configuration, some returns are much stronger than others. Stronger returns tend to obscure weaker ones. Logarithmic scaling augments the features by making return strengths comparable. Amplitude normalization helps the CNN converge faster.
The data set contains realizations of the following scenes:
One pedestrian
One bicyclist
One pedestrian and one bicyclist
Two pedestrians
Two bicyclists
Download Data
The data for this example consists of 20,000 pedestrian, 20,000 bicyclist, and 12,500 car signals generated by using the helper functions helperBackScatterSignals and helperDopplerSignatures. The signals are divided into two data sets: one without car noise samples and one with car noise samples.
For the first data set (without car noise), the pedestrian and bicyclist signals were combined, Gaussian noise was added, and micro-Doppler signatures were computed to generate 5000 signatures for each of the five scenes to be classified.
In each category, 80% of the signatures (that is, 4000 signatures) are reserved for the training data set while 20% of the signatures (that is, 1000 signatures) are reserved for the test data set.
To generate the second data set (with car noise), the procedure for the first data set was followed, except that car noise was added to 50% of the signatures. The proportion of signatures with and without car noise is the same in the training and test data sets.
Download and unzip the data in your temporary directory, whose location is specified by the tempdir command in MATLAB. The data has a size of 21 GB and the download process can take some time. If you have the data in a folder different from tempdir, change the directory name in the subsequent instructions.
% Download the data dataURL = 'https://ssd.mathworks.com/supportfiles/SPT/data/PedBicCarData.zip'; saveFolder = fullfile(tempdir,'PedBicCarData'); zipFile = fullfile(tempdir,'PedBicCarData.zip'); if ~exist(zipFile,'file') websave(zipFile,dataURL); unzip(zipFile,tempdir) elseif ~exist(saveFolder,'dir') % Unzip the data unzip(zipFile,tempdir) end
The data files are as follows:
trainDataNoCar.matcontains the training data settrainDataNoCarand its label settrainLabelNoCar.testDataNoCar.matcontains the test data settestDataNoCarand its label settestLabelNoCar.trainDataCarNoise.matcontains the training data settrainDataCarNoiseand its label settrainLabelCarNoise.testDataCarNoise.matcontains the test data settestDataCarNoiseand its label settestLabelCarNoise.TF.matcontains the time and frequency information for the micro-Doppler signatures.
Network Architecture
Create a CNN with five convolution layers and one fully connected layer. The first four convolution layers are followed by a batch normalization layer, a rectified linear unit (ReLU) activation layer, and a max pooling layer. In the last convolution layer, the max pooling layer is replaced by an average pooling layer. For network design guidance, see Deep Learning Tips and Tricks (Deep Learning Toolbox).
layers = [
imageInputLayer([size(S,1),size(S,2),1],'Normalization','none')
convolution2dLayer(10,16,'Padding','same')
batchNormalizationLayer
reluLayer
maxPooling2dLayer(10,'Stride',2)
convolution2dLayer(5,32,'Padding','same')
batchNormalizationLayer
reluLayer
maxPooling2dLayer(10,'Stride',2)
convolution2dLayer(5,32,'Padding','same')
batchNormalizationLayer
reluLayer
maxPooling2dLayer(10,'Stride',2)
convolution2dLayer(5,32,'Padding','same')
batchNormalizationLayer
reluLayer
maxPooling2dLayer(5,'Stride',2)
convolution2dLayer(5,32,'Padding','same')
batchNormalizationLayer
reluLayer
averagePooling2dLayer(2,'Stride',2)
fullyConnectedLayer(5)
softmaxLayer]layers =
23×1 Layer array with layers:
1 '' Image Input 400×144×1 images
2 '' 2-D Convolution 16 10×10 convolutions with stride [1 1] and padding 'same'
3 '' Batch Normalization Batch normalization
4 '' ReLU ReLU
5 '' 2-D Max Pooling 10×10 max pooling with stride [2 2] and padding [0 0 0 0]
6 '' 2-D Convolution 32 5×5 convolutions with stride [1 1] and padding 'same'
7 '' Batch Normalization Batch normalization
8 '' ReLU ReLU
9 '' 2-D Max Pooling 10×10 max pooling with stride [2 2] and padding [0 0 0 0]
10 '' 2-D Convolution 32 5×5 convolutions with stride [1 1] and padding 'same'
11 '' Batch Normalization Batch normalization
12 '' ReLU ReLU
13 '' 2-D Max Pooling 10×10 max pooling with stride [2 2] and padding [0 0 0 0]
14 '' 2-D Convolution 32 5×5 convolutions with stride [1 1] and padding 'same'
15 '' Batch Normalization Batch normalization
16 '' ReLU ReLU
17 '' 2-D Max Pooling 5×5 max pooling with stride [2 2] and padding [0 0 0 0]
18 '' 2-D Convolution 32 5×5 convolutions with stride [1 1] and padding 'same'
19 '' Batch Normalization Batch normalization
20 '' ReLU ReLU
21 '' 2-D Average Pooling 2×2 average pooling with stride [2 2] and padding [0 0 0 0]
22 '' Fully Connected 5 fully connected layer
23 '' Softmax softmax
Specify the optimization solver and the hyperparameters to train the CNN using trainingOptions. This example uses the Adaptive Moment Estimation (Adam) optimizer and a mini-batch size of 128. Train the network using either a CPU or GPU. Using a GPU requires Parallel Computing Toolbox™. To see which GPUs are supported, see GPU Computing Requirements (Parallel Computing Toolbox). For information on other parameters, see trainingOptions (Deep Learning Toolbox). This example uses a GPU for training.
options = trainingOptions('adam', ... 'ExecutionEnvironment','gpu',... 'MiniBatchSize',128, ... 'MaxEpochs',20, ... 'InitialLearnRate',1e-2, ... 'LearnRateSchedule','piecewise', ... 'LearnRateDropFactor',0.1, ... 'LearnRateDropPeriod',10, ... 'Shuffle','every-epoch', ... 'Verbose',false, ... 'Plots','training-progress');
Classify Signatures Without Car Noise
Load the data set without car noise and use the helper function helperPlotTrainData to plot one example of each of the five categories in the training data set.
load(fullfile(tempdir,'PedBicCarData','trainDataNoCar.mat')) % load training data set load(fullfile(tempdir,'PedBicCarData','testDataNoCar.mat')) % load test data set load(fullfile(tempdir,'PedBicCarData','TF.mat')) % load time and frequency information helperPlotTrainData(trainDataNoCar,trainLabelNoCar,T,F)
Train the CNN. You can view the loss during the training process.
trainedNetNoCar = trainnet(trainDataNoCar,trainLabelNoCar,layers,'crossentropy',options);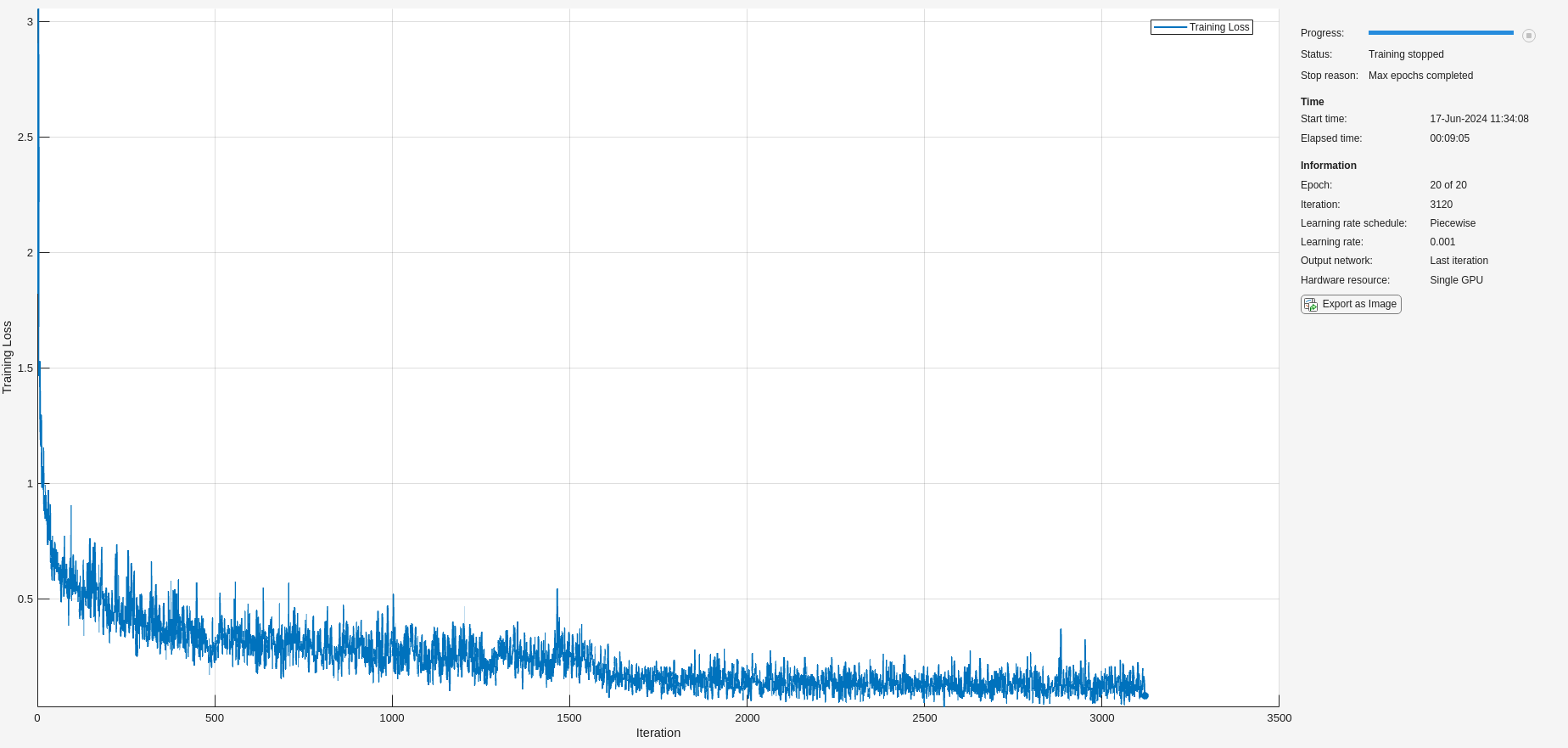
Use the trained network with the minibatchpredict and the scores2label functions to obtain the predicted labels for the test data set testDataNoCar. The variable predTestLabel contains the network predictions. The network achieves about 95% accuracy for the test data set without the car noise.
scores = minibatchpredict(trainedNetNoCar,testDataNoCar);
classNames = categories(trainLabelNoCar);
predTestLabel = scores2label(scores,classNames);
testAccuracy = mean(predTestLabel == testLabelNoCar);
sprintf('No Car Noise Network Tested with No Car Noise Data: \n\tAccuracy = %.2f%%n',testAccuracy*100)ans =
'No Car Noise Network Tested with No Car Noise Data:
Accuracy = 95.06%
'
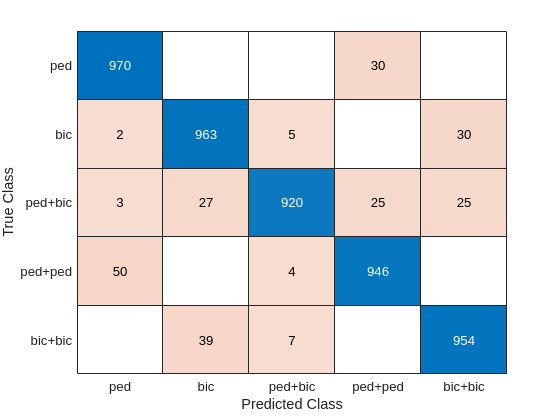
Use a confusion matrix to view detailed information about prediction performance for each category. The confusion matrix for the trained network shows that, in each category, the network predicts the labels of the signals in the test data set with a high degree of accuracy.
figure confusionchart(testLabelNoCar,predTestLabel);
Classify Signatures with Car Noise
To analyze the effects of car noise, classify data containing car noise with the trainedNetNoCar network, which was trained without car noise.
Load the car-noise-corrupted test data set testDataCarNoise.mat.
load(fullfile(tempdir,'PedBicCarData','testDataCarNoise.mat'))
Input the car-noise-corrupted test data set to the network. The prediction accuracy for the test data set with the car noise drops significantly, to around 72%, because the network never saw training samples containing car noise.
scores = minibatchpredict(trainedNetNoCar,testDataCarNoise);
predTestLabel = scores2label(scores,classNames);
testAccuracy = mean(predTestLabel == testLabelCarNoise);
sprintf('No Car Noise Network Tested with Car Noise Data: \n\tAccuracy = %.2f%%n',testAccuracy*100)ans =
'No Car Noise Network Tested with Car Noise Data:
Accuracy = 71.72%
'
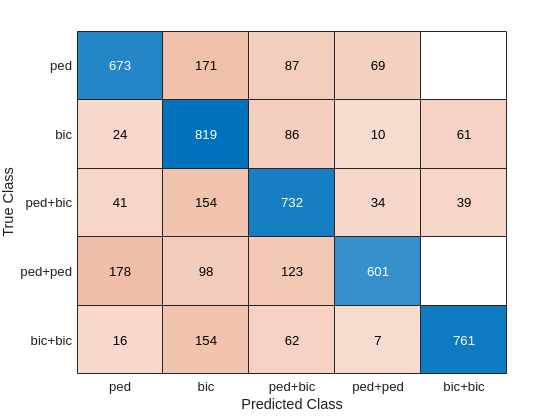
The confusion matrix shows that most prediction errors occur when the network takes in scenes from the pedestrian, pedestrian+pedestrian, or pedestrian+bicyclist classes and classifies them as bicyclist.
confusionchart(testLabelCarNoise,predTestLabel);
Car noise significantly impedes the performance of the classifier. To solve this problem, train the CNN using data that contains car noise.
Retrain CNN by Adding Car Noise to Training Data Set
Load the car-noise-corrupted training data set trainDataCarNoise.mat.
load(fullfile(tempdir,'PedBicCarData','trainDataCarNoise.mat'))
Retrain the network by using the car-noise-corrupted training data set.
trainedNetCarNoise = trainnet(trainDataCarNoise,trainLabelCarNoise,layers,'crossentropy',options);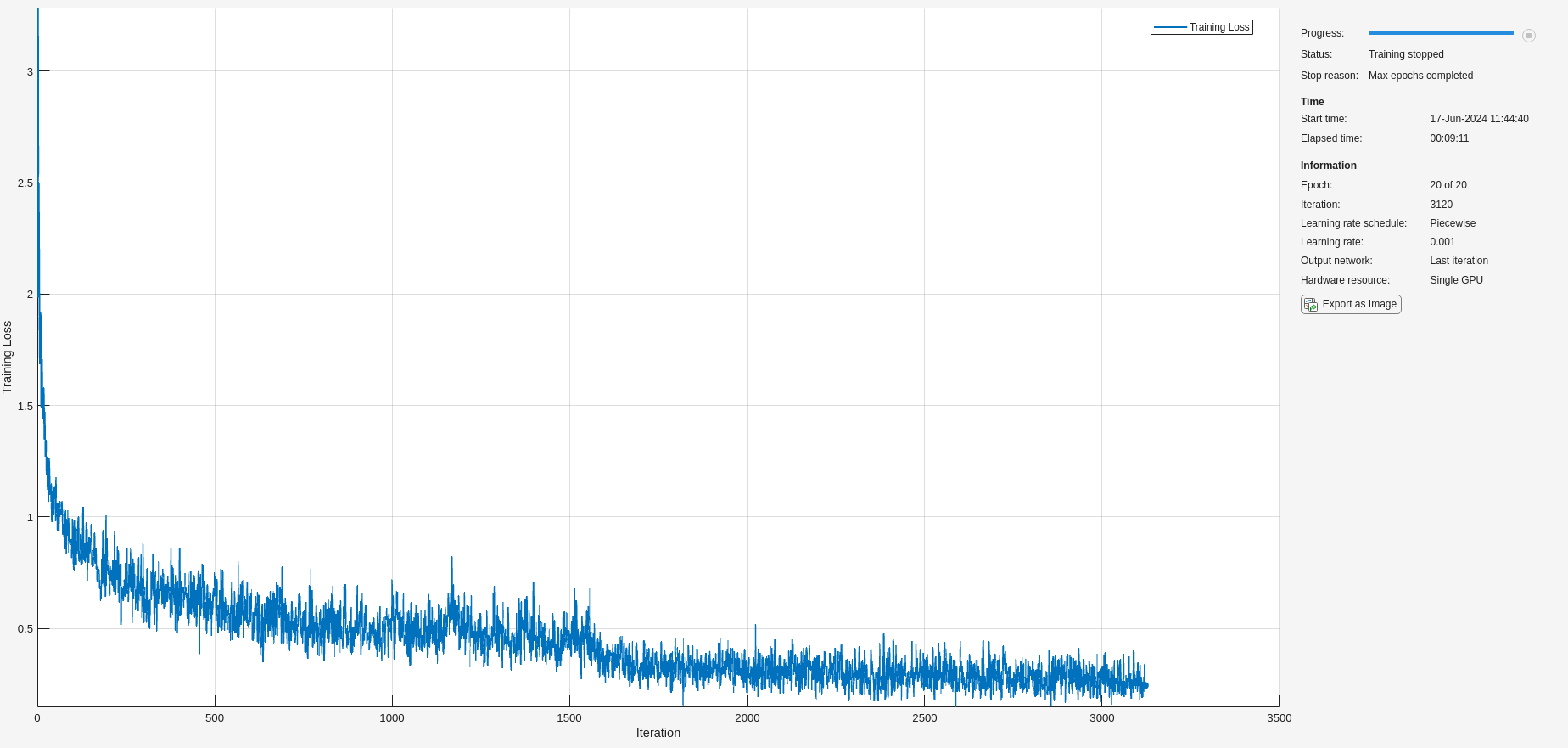
Input the car-noise-corrupted test data set to the network trainedNetCarNoise. The prediction accuracy is about 85%, which is approximately 13% higher than the performance of the network trained without car noise samples.
scores = minibatchpredict(trainedNetCarNoise,testDataCarNoise);
predTestLabel = scores2label(scores,classNames);
testAccuracy = mean(predTestLabel == testLabelCarNoise);
sprintf('Car Noise Network Tested with Car Noise Data: \n\tAccuracy = %.2f%%n',testAccuracy*100)ans =
'Car Noise Network Tested with Car Noise Data:
Accuracy = 84.88%
'
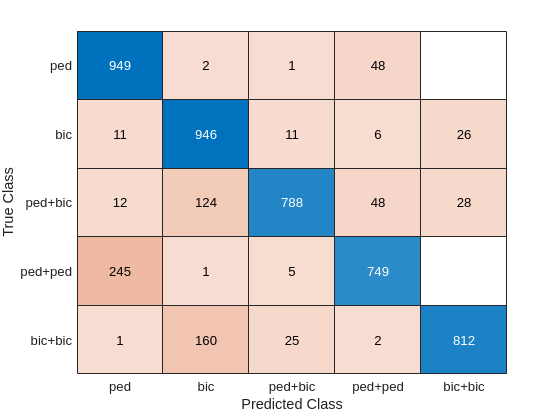
The confusion matrix shows that the network trainedNetCarNoise performs much better at predicting scenes with one pedestrian and scenes with two pedestrians.
confusionchart(testLabelCarNoise,predTestLabel);
Case Study
To better understand the performance of the network, examine its performance in classifying overlapping signatures. This section is just for illustration. Due to the non-deterministic behavior of GPU training, you may not get the same classification results in this section when you rerun this example.
For example, the fourth signature of the car-noise-corrupted test data, which does not have car noise, has two bicyclists with overlapping micro-Doppler signatures. The network correctly predicts that the scene has two bicyclists.
k = 4; imagesc(T,F,testDataCarNoise(:,:,:,k)) axis xy xlabel('Time (s)') ylabel('Frequency (Hz)') title('Ground Truth: '+string(testLabelCarNoise(k))+', Prediction: '+string(predTestLabel(k))) c = colorbar; c.Label.String = 'dB';
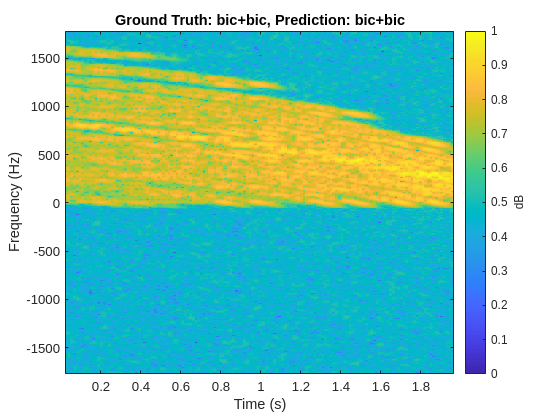
From the plot, the signature appears to be from only one bicyclist. Load the data CaseStudyData.mat of the two objects in the scene. The data contains return signals summed along the fast time. Apply the STFT to each signal.
load CaseStudyData.mat M = 200; % FFT window length beta = 6; % window parameter w = kaiser(M,beta); % kaiser window R = floor(1.7*(M-1)/(beta+1)); % ROUGH estimate noverlap = M-R; % overlap length [Sc,F,T] = stft(x,1/Tsamp,'Window',w,'FFTLength',M*2,'OverlapLength',noverlap); for ii = 1:2 subplot(1,2,ii) imagesc(T,F,10*log10(abs(Sc(:,:,ii)))) xlabel('Time (s)') ylabel('Frequency (Hz)') title('Bicyclist') axis square xy title(['Bicyclist ' num2str(ii)]) c = colorbar; c.Label.String = 'dB'; end
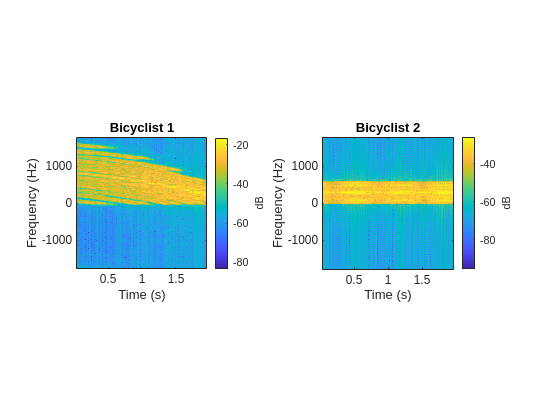
The amplitudes of the Bicyclist 2 signature are much weaker than those of Bicyclist 1, and the signatures of the two bicyclists overlap. When they overlap, the two signatures cannot be visually distinguished.
Another case of interest is when the car noise dominates as in signature 267 of the car-noise-corrupted test data.
figure k = 267; imagesc(T,F,testDataCarNoise(:,:,:,k)) axis xy xlabel('Time (s)') ylabel('Frequency (Hz)') title('Ground Truth: '+string(testLabelCarNoise(k))+', Prediction: '+string(predTestLabel(k))) c = colorbar; c.Label.String = 'dB';
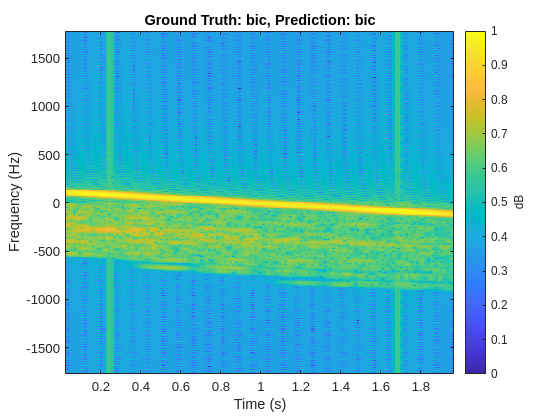
The signature of the bicyclist is weak compared to that of the car, and the signature has spikes from the car noise. Because the signature of the car closely resembles that of a bicyclist pedaling or a pedestrian walking at a low speed and has little micro-Doppler effect, there is a high possibility that the network will classify the scene incorrectly. In this case, the network was able to correctly identify the target as a single bicyclist.
References
Angelov, Aleksandar, Andrew Robertson, Roderick Murray‐Smith, and Francesco Fioranelli. “Practical Classification of Different Moving Targets Using Automotive Radar and Deep Neural Networks.” IET Radar, Sonar & Navigation 12, no. 10 (October 2018): 1082–89.
Belgiovane, Domenic, and Chi-Chih Chen. “Micro-Doppler Characteristics of Pedestrians and Bicycles for Automotive Radar Sensors at 77 GHz.” In 2017 11th European Conference on Antennas and Propagation (EUCAP), 2912–16. Paris, France: IEEE, 2017.
Chen, Victor C. The Micro-Doppler Effect in Radar. Artech House Radar Series. Boston: Artech House, 2011.
Gurbuz, Sevgi Zubeyde, and Moeness G. Amin. “Radar-Based Human-Motion Recognition With Deep Learning: Promising Applications for Indoor Monitoring.” IEEE Signal Processing Magazine 36, no. 4 (July 2019): 16–28.
Parashar, Karthick N., Meshia Cedric Oveneke, Maxim Rykunov, Hichem Sahli, and Andre Bourdoux. “Micro-Doppler Feature Extraction Using Convolutional Auto-Encoders for Low Latency Target Classification.” In 2017 IEEE Radar Conference (RadarConf), 1739–44. Seattle, WA, USA: IEEE, 2017.