Configure Network Parameters of Windows Computer
Follow these instructions to set up the respective network adapter in the host computer running the ROS driver, and test the network ping.
Set Up Network Adapter and Basic Network Ping on Windows
Follow these steps if you have installed Robotics System Toolbox™ Support Package for Universal Robots UR Series Manipulators on Windows®:
Connect the Ethernet cable from the host computer to the robot base.
On the Windows Start menu, search for
Network statusand open the Network status setting. Click Change adapter options.
In the Network Connections window, locate the Ethernet adapter connected to the robot and click Properties from the context menu.

In the Ethernet Properties dialog box, edit the Internet Protocol Version 4 (TCP/IPv4) Properties to set the values for the parameters as shown in this figure:
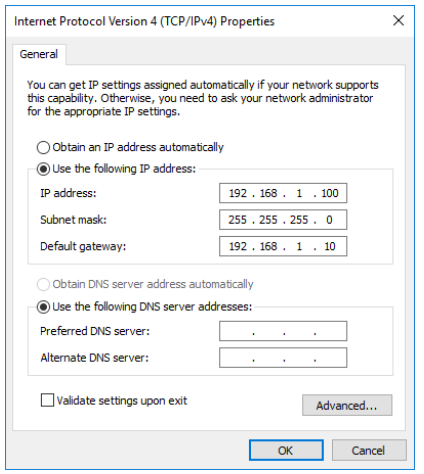
Click OK. In the Ethernet Properties dialog box, click OK to save the settings.
Perform a test ping using the Windows command prompt to the robot and ensure that the ping is successful.
ping 192.168.1.10
Continue with the Hardware Setup screens.