Statistics
2 Files
Blogs16 Posts
RANK
N/A
of 289,756
REPUTATION
N/A
CONTRIBUTIONS
0 Questions
0 Answers
ANSWER ACCEPTANCE
0.00%
VOTES RECEIVED
0
RANK
2,842 of 19,582
REPUTATION
563
AVERAGE RATING
5.00
CONTRIBUTIONS
2 Files
DOWNLOADS
64
ALL TIME DOWNLOADS
5486
RANK
of 144,136
CONTRIBUTIONS
0 Problems
0 Solutions
SCORE
0
NUMBER OF BADGES
0
CONTRIBUTIONS
16 Posts
CONTRIBUTIONS
0 Public Channels
AVERAGE RATING
CONTRIBUTIONS
0 Highlights
AVERAGE NO. OF LIKES

Your submissions received 3 five star ratings
Awarded to Mihir Acharya on 24 Oct 2022

Your submissions were downloaded 100 or more times in a month
Awarded to Mihir Acharya on 01 Nov 2019

Publish your first review
Awarded to Mihir Acharya on 09 Oct 2019

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publish your first submission
Awarded to Mihir Acharya on 09 Oct 2019
Feeds
Published
How MathWorks is Enabling Supernal’s Advanced Air Mobility Development with Integrated Simulation Systems
Co-authored by Mihir Acharya, Senior Product Manager, Robotics and Autonomous Systems at MathWorks, and Fahad Khan, Head of...
20 hours ago
Published
Enabling Off-Road Simulation with MATLAB and MSU Autonomous Vehicle Simulator (MAVS)
Autonomous vehicle technology is now venturing beyond the structured confines of urban landscapes into unpredictable...
2 months ago

Published
🤖💡 Making Remote Robot Software Updates a Breeze: Discover the Power of ROS Toolbox & Automated Tools
In the dynamic world of robotics, ensuring that your robots operate with the latest software is a cornerstone of...
3 months ago

Published
Practical Challenges in Deploying Autonomy to Offroad Vehicles
In this MathWorks fireside chat, MathWorks Robotics Industry Manager, Dr. You Wu, sat down with two distinguished leaders...
4 months ago

Published
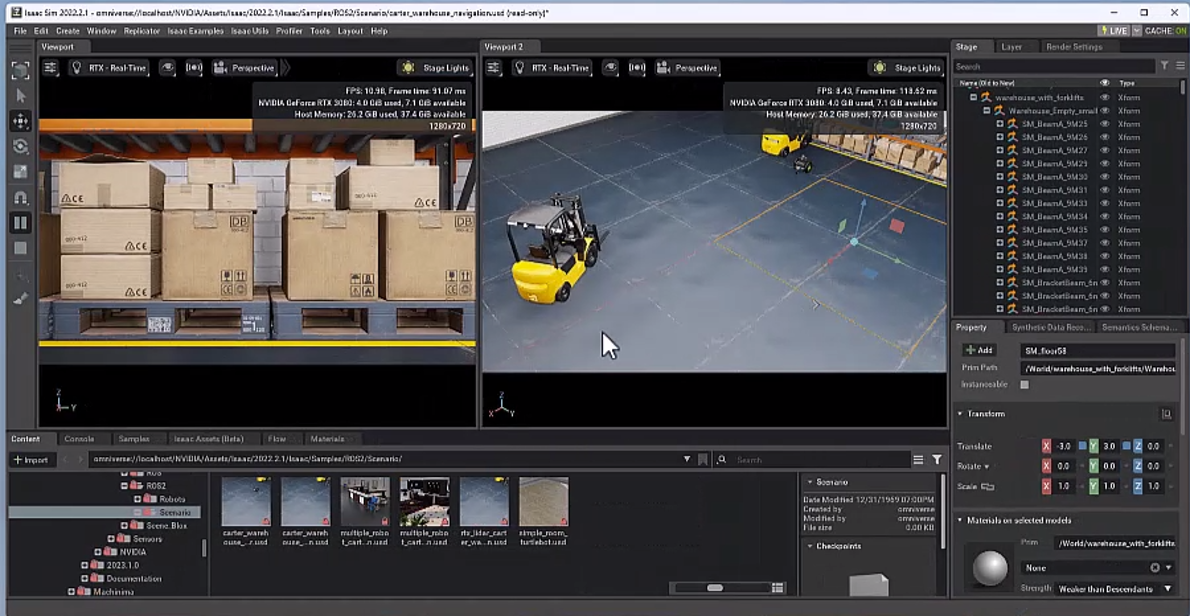
Building Realistic Robot Simulations with MATLAB and NVIDIA Isaac Sim
In this blog post, my colleague Dave Schowalter will introduce you to a new ecosystem that combines the photo-realistic...
8 months ago
Published
Overcoming 4 Key Challenges in Cobot Software Development
Close your eyes and picture a collaborative robot (Cobot) in action. What do you see? For me it’s a robot able to...
8 months ago
Published
Accelerate Aerial Autonomy with Simulink and Microsoft Project AirSim
In this blog post, we’re going to take a deep dive into a co-simulation workflow using Microsoft’s Project AirSim and...
9 months ago

Published
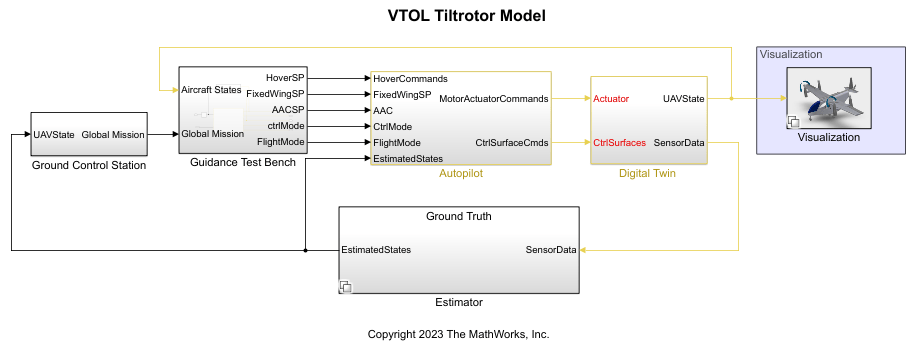
Prevent UAV Crashes with Integrated Simulation Workflows: Insights from AUVSI Xponential 2023
The possibility of Unmanned Aerial Systems (UAS/UAV) improving day-to-day transportation seems closer than ever, with...
11 months ago
Published
Join us at MATLAB EXPO 2023
MATLAB EXPO is back! Join us virtually on May 10-11, 2023. Attending the event is free, but you must register in advance....
12 months ago
Published
Using MATLAB for Robotics Education
This post is from Peter Corke, a professor, researcher, teacher and writer about robotics and robotic vision. The...
1 year ago
Published
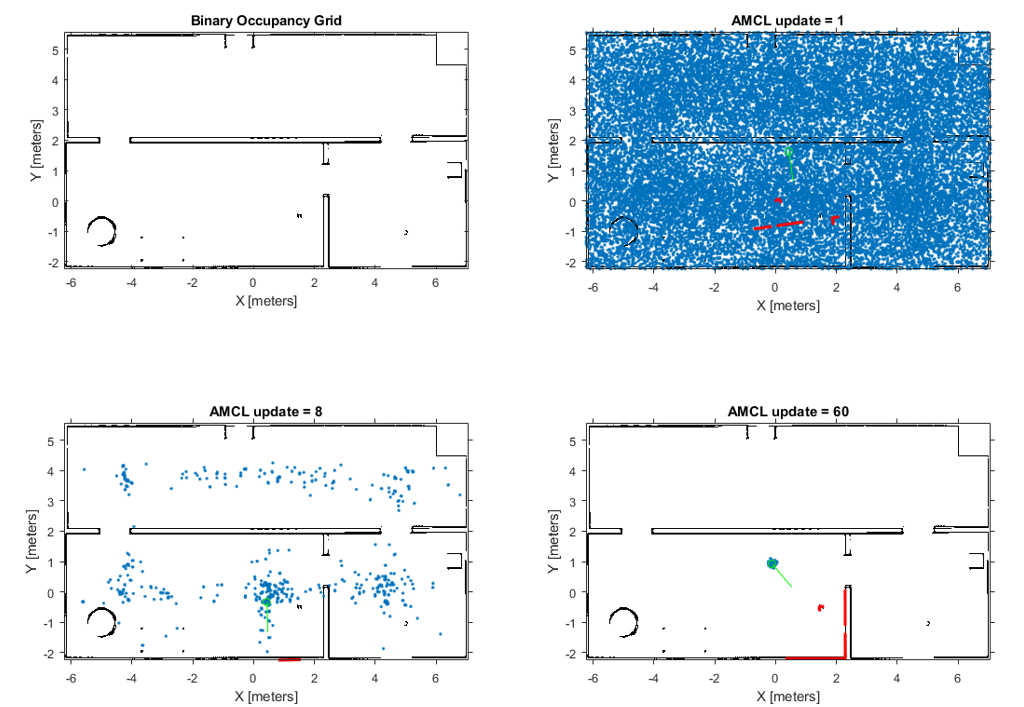
Intuition Behind the Particle Filter
Autonomous Navigation with Brian Douglas: Part 5 This post is from Brian Douglas, YouTube content creator for Control...
1 year ago
Published
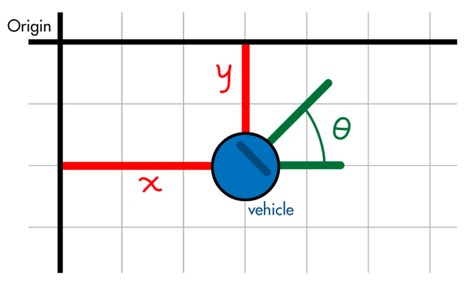
Where am I? (The Localization Problem)
Autonomous Navigation with Brian Douglas: Part 4 This post is from Brian Douglas, YouTube content creator for Control...
1 year ago
Published
4 Capabilities of Autonomous Navigation Systems
Autonomous Navigation with Brian Douglas: Part 3 This post is from Brian Douglas, YouTube content creator for Control...
1 year ago
Published
Autonomous Navigation with Brian Douglas, Part 2: Heuristic vs Optimal Approach for Full Autonomy
What is autonomous navigation? we learnt that in the last post of this blog series. In this one, Brian will talk about...
1 year ago
Published
Autonomous Navigation with Brian Douglas, Part 1: Introduction
How do robots and autonomous vehicles navigate in different environments? We collaborated with Brian Douglas to help you...
1 year ago
Published
Welcome to the Autonomous Systems Blog!
With robots delivering packages, driverless robo-taxis showing up for the rides and humans co-working with machines, we are...
1 year ago

Submitted
Inverse Kinematics of a 2-link Robot Arm
Calculate and visualize the inverse kinematics of a 2-link robot arm along with the Jacobian, and make the robot to write Hello....
5 years ago | 34 downloads |

Submitted
Implement Simultaneous Localization and Mapping (SLAM) with
Develop a map of an environment and localize the pose of a robot for autonomous navigation.
5 years ago | 30 downloads |

You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)