ビデオプレイヤーは読み込み中です。
Automated Driving ToolboxとRoadRunner Scenarioを用いたシナリオハーベスティング
シナリオハーベスティングは、Automated Driving Toolbox™とRoadRunnerを利用して車両ログからデジタルツインデータを生成するワークフローです。
このワークフローは、以下のような複数のデータ処理タスクで構成されています。
- GPSとIMUセンサーフュージョンによる自車両の軌道生成
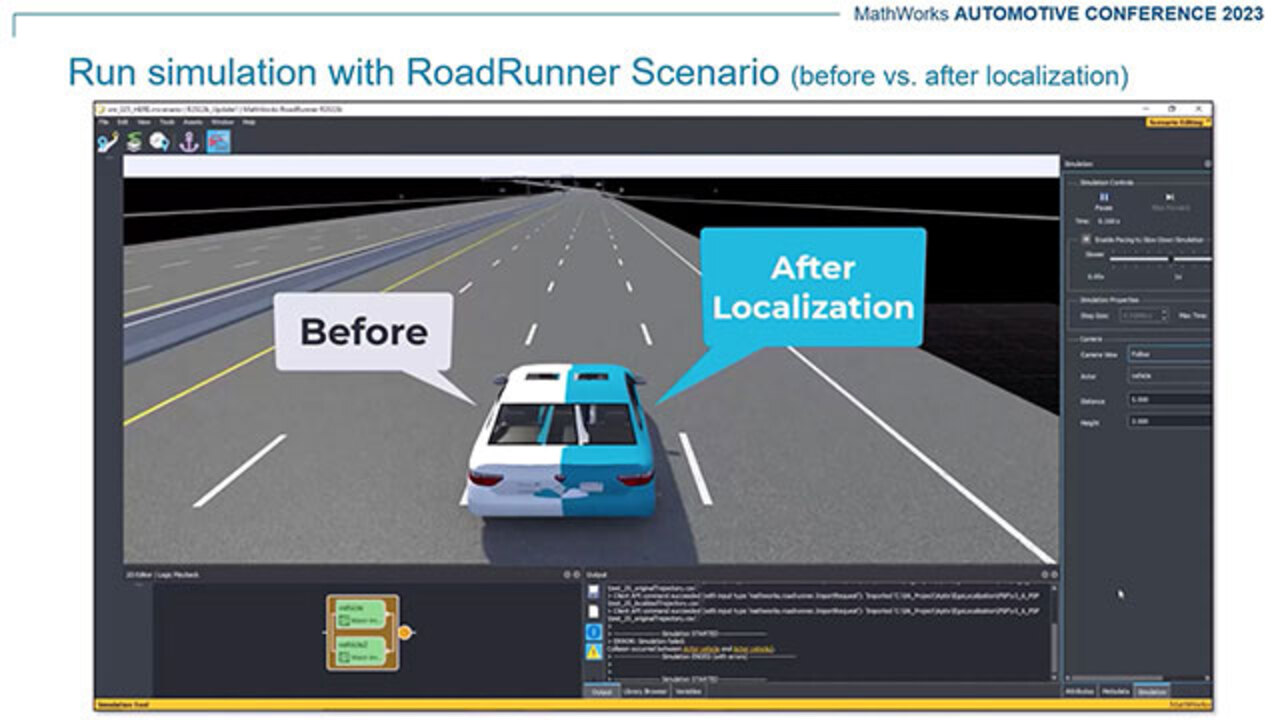
- 車線検出と高精細マップによる自己位置特定
- 記録されたLiDAR、レーダー、ビジョンセンサーのデータから目標車両の軌道を作成
RoadRunner Scenarioは、作成したシナリオをOpenSCENARIO®にエクスポートします。OpenSCENARIOは、先進運転支援システム(ADAS)と自動運転(AD)アルゴリズムの回帰テストに使用されます。
公開年: 2024 年 2 月 14 日









Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)