dsp.NotchPeakFilter
Second-order tunable notching and peaking IIR filter
Description
The NotchPeakFilter object filters each channel of the
input using IIR filter implementation. This object implements a second-order notch or peak IIR
filter.
To implement a high-order notch or peak IIR filter,
use the designNotchPeakIIR
function. (since R2023b)
To filter each channel of the input:
Create the
dsp.NotchPeakFilterobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
npFilter = dsp.NotchPeakFilter
npFilter = dsp.NotchPeakFilter(Specification='Quality
factor and center frequency') specifies the quality factor (Q factor) of the
notch or peak filter instead of the 3 dB bandwidth.
npFilter = dsp.NotchPeakFilter(Specification='Coefficients')
specifies the coefficient values that affect bandwidth and center frequency directly,
rather than specifying the design parameters in Hz. This removes the trigonometry
calculations involved when the properties are tuned.
npFilter = dsp.NotchPeakFilter(
returns a notch or peak filter with properties specified by one or more name-value
arguments. Unspecified properties have default values.PropertyName=Value)
Properties
Usage
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object™ as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
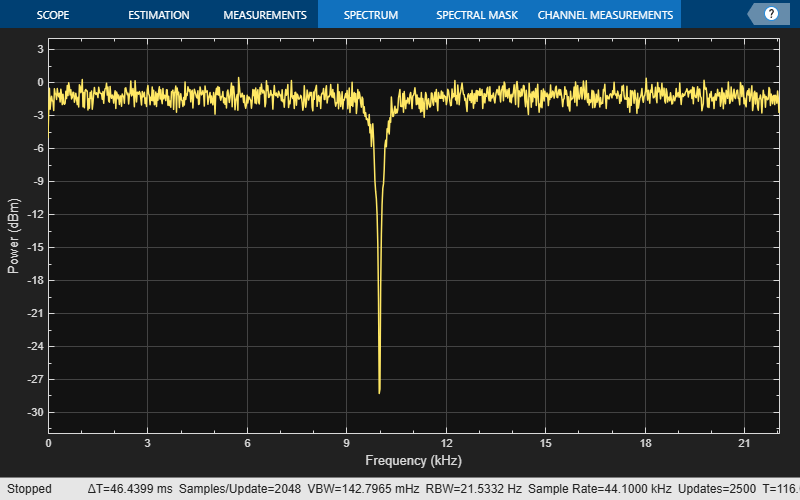
This example shows how to use the dsp.NotchPeakFilter object as a notch filter with a center frequency of 5000 Hz and a 3 dB bandwidth of 500 Hz.
npFilter = dsp.NotchPeakFilter(CenterFrequency=5000,Bandwidth=500); sa = spectrumAnalyzer(SampleRate=44100,AveragingMethod='exponential',... ForgettingFactor=0.96,PlotAsTwoSidedSpectrum=false); for i=1:5000 y = npFilter(randn(1024,1)); sa(y); if (i==2500) % Tune center frequency to 10000 npFilter.CenterFrequency = 10000; end end release(npFilter) release(sa)
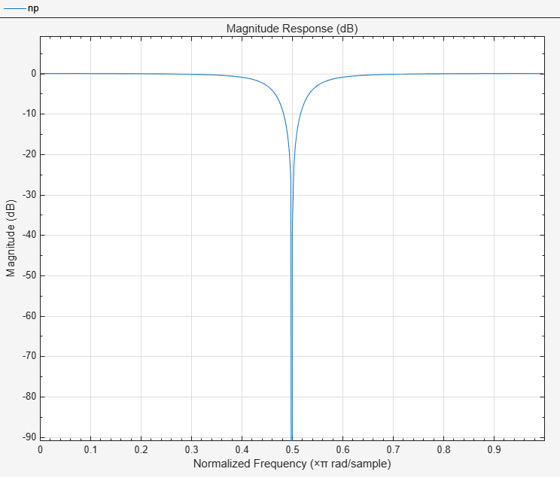
Create a dsp.NotchPeakFilter object. Set the Specification property to 'Quality factor and center frequency' and the NormalizedFrequency property to true. The default quality factor Q is 5, and the center frequency Fc is 0.5 in normalized units.
np = dsp.NotchPeakFilter(Specification='Quality factor and center frequency',... NormalizedFrequency=true)
np =
dsp.NotchPeakFilter with properties:
Specification: 'Quality factor and center frequency'
QualityFactor: 5
CenterFrequency: 0.5000
NormalizedFrequency: true
Compute the 3 dB bandwidth of the notch peak filter using the getBandwidth function. The function computes the bandwidth as the ratio of the center frequency and the quality factor, . Since Fc is in normalized units, the function computes the 3 dB bandwidth in normalized units.
getBandwidth(np)
ans = 0.1000
Visualize the filter response.
filterAnalyzer(np)
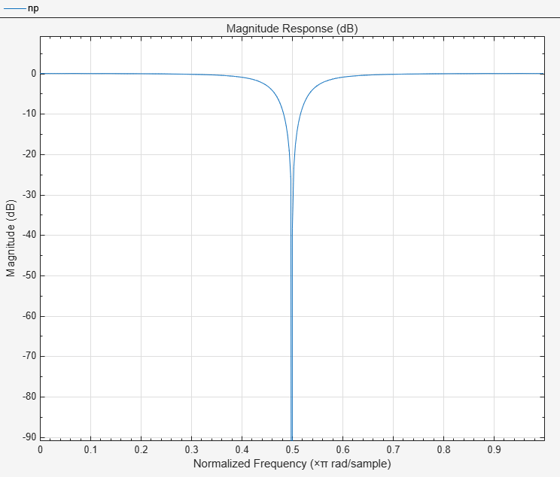
Create a dsp.NotchPeakFilter object with the Specification property set to 'Coefficients'.
np = dsp.NotchPeakFilter(Specification='Coefficients')np =
dsp.NotchPeakFilter with properties:
Specification: 'Coefficients'
BandwidthCoefficient: 0.7265
CenterFrequencyCoefficient: 0
Determine the center frequency of the notch peak filter using the getCenterFrequency function. When the Specification is set to 'Coefficients', the center frequency is determined from the CenterFrequencyCoefficient value and the sample rate.
getCenterFrequency(np)
ans = 0.5000
Visualize the filter response.
filterAnalyzer(np)
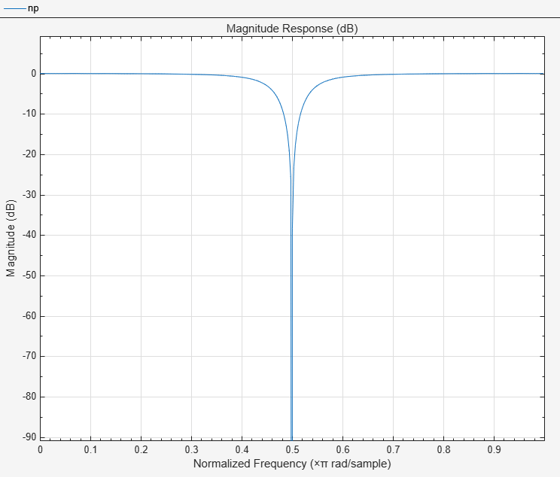
Create a dsp.NotchPeakFilter object with the NormalizedFrequency property set to true.
np = dsp.NotchPeakFilter(NormalizedFrequency=true)
np =
dsp.NotchPeakFilter with properties:
Specification: 'Bandwidth and center frequency'
Bandwidth: 0.1000
CenterFrequency: 0.5000
NormalizedFrequency: true
Determine the octave bandwidth of the filter using the getOctaveBandwidth function.
getOctaveBandwidth(np)
ans = 0.2881
Visualize the filter response using filterAnalyzer.
filterAnalyzer(np)
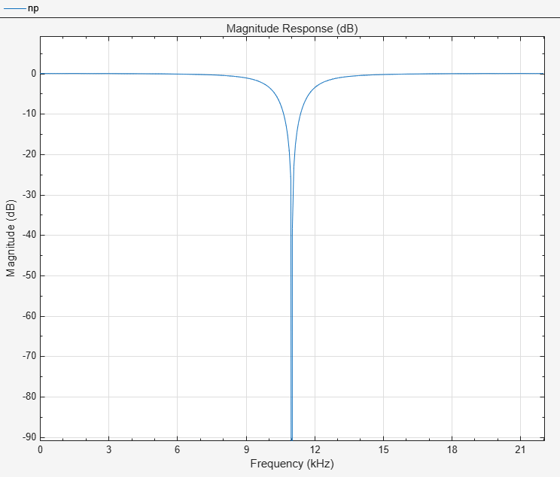
Create a dsp.NotchPeakFilter object in the default configuration, where the Specification property is set to 'Bandwidth and center frequency'.
np = dsp.NotchPeakFilter
np =
dsp.NotchPeakFilter with properties:
Specification: 'Bandwidth and center frequency'
Bandwidth: 2205
CenterFrequency: 11025
NormalizedFrequency: false
SampleRate: 44100
Determine the quality factor of the filter using the getQualityFactor function. The quality factor is given by the ratio of the center frequency to the bandwidth.
getQualityFactor(np)
ans = 5
Visualize the filter response using filterAnalyzer.
filterAnalyzer(np)
Create a dsp.NotchPeakFilter System object™. Obtain the coefficients of the transfer function corresponding to the notch and peak filters.
notchpeak = dsp.NotchPeakFilter; [Bnotch,Anotch,Bpeak,Apeak] = tf(notchpeak)
Bnotch = 1×3
0.8633 -0.0000 0.8633
Anotch = 1×3
1.0000 -0.0000 0.7265
Bpeak = 1×3
0.1367 0 -0.1367
Apeak = 1×3
1.0000 -0.0000 0.7265
Bnotch and Anotch are the vectors of numerator and denominator coefficients for the equivalent transfer function corresponding to the notch filter. Bpeak and Apeak are the vectors of numerator and denominator coefficients for the equivalent transfer function corresponding to the peak filter.
Algorithms
The design equation for the peak filter is:
The design equation for the notch filter is:
with
where ω0 = 2πf0/fs is the center frequency in radians/sample (f0 is the center frequency in Hz and fs is the sampling frequency in Hz). Δω = 2πΔf/fs is the 3 dB bandwidth in radians/sample (Δf is the 3 dB bandwidth in Hz). Note that the two filters are complementary:
The filter is implemented as follows:

where
Notice that Gcf depends only on the center frequency, and G3dB depends only on the 3 dB bandwidth.
References
[1] Orfanidis, Sophocles J. Introduction to Signal Processing. Upper Saddle River, NJ: Prentice-Hall, 1996.
Version History
Introduced in R2014aSee Also
Functions
designNotchPeakIIR|getBandwidth|getCenterFrequency|getOctaveBandwidth|getQualityFactor|tf|outputDelay