initapekf
Constant velocity angle-parameterized EKF initialization
Syntax
Description
filter = initapekf(detection)
The angle-parameterized extended Kalman filter (APEKF) is a Gaussian-sum filter
(trackingGSF) with
multiple EKFs, each initialized at an estimated angular position of the target.
Angle-parametrization is a commonly used technique to initialize a filter from a range-only
detection.
filter = initapekf(detection,numFilters)
filter = initapekf(detection,numFilters,angleLimits)
Examples
The APEKF is a special type of filter that can be initialized using range-only measurements. When the 'Frame' is set to 'spherical', the detection has [azimuth elevation range range-rate] measurements. Specify the measurement parameters appropriately to define a range-only measurement.
measParam = struct('Frame','Spherical','HasAzimuth',false,'HasElevation',false,'HasVelocity',false,'OriginPosition',[100;10;0]);
The objectDetection class defines an interface to the range-only detection measured by the sensor. The MeasurementParameters field of objectDetection carries information about what the sensor is measuring.
detection = objectDetection(0,100,'MeasurementNoise',100,'MeasurementParameters',measParam)
detection =
objectDetection with properties:
Time: 0
Measurement: 100
MeasurementNoise: 100
SensorIndex: 1
ObjectClassID: 0
ObjectClassParameters: []
MeasurementParameters: [1×1 struct]
ObjectAttributes: {}
The initapekf function uses the range-only detection to initialize the APEKF.
apekf = initapekf(detection) %#okapekf =
trackingGSF with properties:
State: [6×1 double]
StateCovariance: [6×6 double]
TrackingFilters: {10×1 cell}
HasMeasurementWrapping: [0 0 0 0 0 0 0 0 0 0]
ModelProbabilities: [10×1 double]
MeasurementNoise: 100
You can also initialize the APEKF with 10 filters and to operate within the angular limits of [-30 30] degrees.
angleLimits = [-30 30]; numFilters = 10; apekf = initapekf(detection, numFilters, angleLimits)
apekf =
trackingGSF with properties:
State: [6×1 double]
StateCovariance: [6×6 double]
TrackingFilters: {10×1 cell}
HasMeasurementWrapping: [0 0 0 0 0 0 0 0 0 0]
ModelProbabilities: [10×1 double]
MeasurementNoise: 100
You can also specify the initapekf function as a FilterInitializationFcn to the trackerGNN object.
funcHandle = @(detection)initapekf(detection,numFilters,angleLimits)
funcHandle = function_handle with value:
@(detection)initapekf(detection,numFilters,angleLimits)
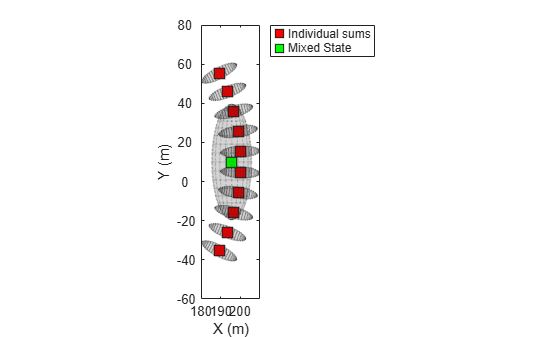
tracker = trackerGNN('FilterInitializationFcn',funcHandle);Visualize the filter.
tp = theaterPlot; componentPlot = trackPlotter(tp,'DisplayName','Individual sums','MarkerFaceColor','r'); sumPlot = trackPlotter(tp,'DisplayName','Mixed State','MarkerFaceColor','g'); indFilters = apekf.TrackingFilters; pos = zeros(numFilters,3); cov = zeros(3,3,numFilters); for i = 1:numFilters pos(i,:) = indFilters{i}.State(1:2:end); cov(1:3,1:3,i) = indFilters{i}.StateCovariance(1:2:end,1:2:end); end componentPlot.plotTrack(pos,cov); mixedPos = apekf.State(1:2:end)'; mixedPosCov = apekf.StateCovariance(1:2:end,1:2:end); sumPlot.plotTrack(mixedPos,mixedPosCov);
Create an angle-parameterized EKF from an [az r] detection.
measParam = struct('Frame','Spherical','HasAzimuth',true,'HasElevation',false,'HasVelocity',false,'OriginPosition',[100;10;0]);
The objectDetection class defines an interface to the range-only detection measured by the sensor. The MeasurementParameters field of objectDetection carries information about what the sensor is measuring.
det = objectDetection(0,[30;100],'MeasurementParameters',measParam,'MeasurementNoise',10);
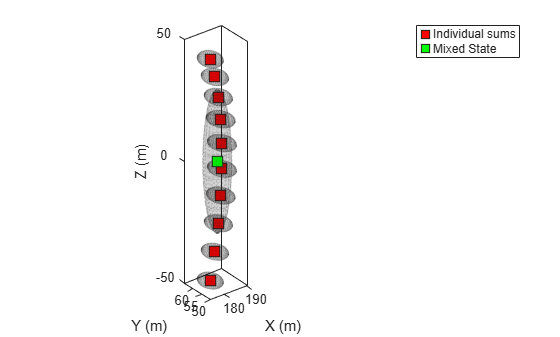
The initapekf function parameterizes the apekf filter on the elevation measurement.
numFilters = 10; apekf = initapekf(det,numFilters,[-30 30]); indFilters = apekf.TrackingFilters; pos = zeros(numFilters,3); cov = zeros(3,3,numFilters); for i = 1:numFilters pos(i,:) = indFilters{i}.State(1:2:end); cov(1:3,1:3,i) = indFilters{i}.StateCovariance(1:2:end,1:2:end); end
Visualize the filter.
tp = theaterPlot; componentPlot = trackPlotter(tp,'DisplayName','Individual sums','MarkerFaceColor','r'); sumPlot = trackPlotter(tp,'DisplayName','Mixed State','MarkerFaceColor','g'); componentPlot.plotTrack(pos,cov); mixedPos = apekf.State(1:2:end)'; mixedPosCov = apekf.StateCovariance(1:2:end,1:2:end); sumPlot.plotTrack(mixedPos,mixedPosCov); view(3);
Input Arguments
Output Arguments
Algorithms
The function can support the following types of measurements in the detection.
Range measurements –– Parameterization is done on the azimuth of the target, and the angular limits are [–180 180] by default.
Azimuth and range measurements –– Parameterization is done on the elevation of the target, and the angular limits are [–90 90] by default.
References
[1] Ristic, Branko, Sanjeev Arulampalam, and James McCarthy. "Target motion analysis using range-only measurements: algorithms, performance and application to ISAR data." Signal Processing 82, no. 2 (2002): 273-296.
Extended Capabilities
Version History
Introduced in R2018b