Hall Validity
Compute rotor spin direction and validity of Hall sensor sequence
Libraries:
Motor Control Blockset /
Sensor Decoders
Description
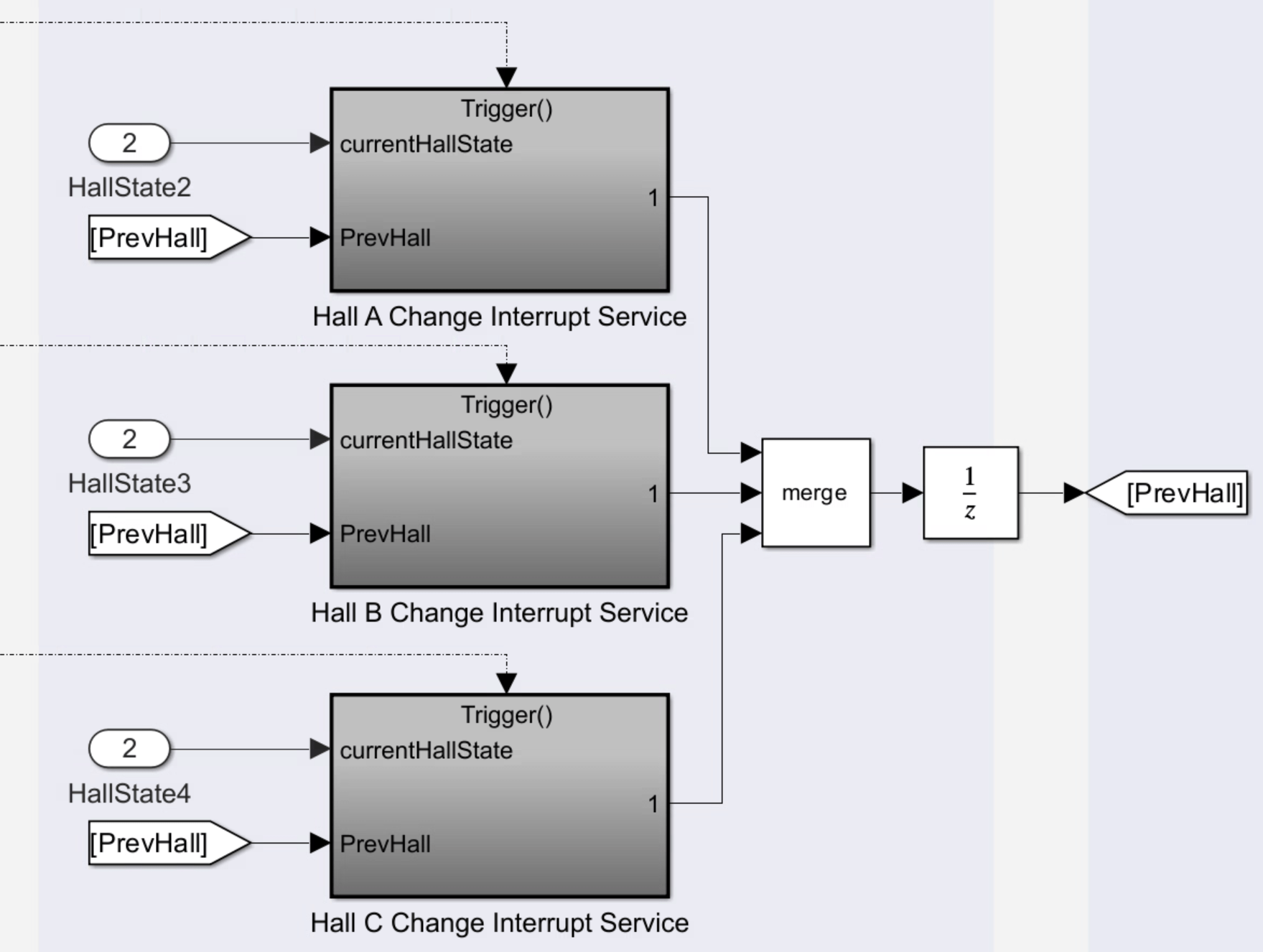
The Hall Validity block checks and validates every state of the Hall sensor output sequence. The block identifies the condition when one or more Hall sensors are in an invalid state.
The block executes when a Hall sensor output state (or Hall state) changes.
Examples
How to Use Hall Validity and Hall Speed and Position Blocks
Integrate Hall Validity and Hall Decoder blocks with field-oriented control (FOC) algorithm.

Hall Offset Calibration for PMSM
Calculates the offset between the rotor direct axis (d-axis) and position detected by the Hall sensor. The field-oriented control (FOC) algorithm needs this position offset to run the permanent magnet synchronous motor (PMSM) correctly. To compute the offset, the target model runs the motor in the open-loop condition. The model uses a constant (voltage along the stator's
d-axis) and a zero (voltage along the stator's
q-axis) to run the motor (at a low constant speed) by using a position or ramp generator. When the position or ramp value reaches zero, the corresponding rotor position is the offset value for the Hall sensors.

Field-Oriented Control of PMSM Using Hall Sensor
Implements the field-oriented control (FOC) technique to control the speed of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which is obtained by a Hall sensor. For details about FOC, see Field-Oriented Control.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2020a