Wheel Encoder Error Sources
Explore the various error sources of wheel encoders and how they affect the wheel odometry estimate. After defining a ground truth trajectory, change parameters for wheel radius bias, wheel position noise, wheel slippage, and track width for the various wheel encoder objects. Notice the affects of changing these parameters on the output trajectory from the wheel encoder sensor models.
Ground Truth Trajectory
Create a ground truth trajectory to be used when examining the error parameters. Plot the trajectory.
Fs = 100;
wps = [0 0 0;
20 0 0;
20 5 0;
0 5 0;
0 0 0];
toa = cumsum([0 10 1.25*pi 10 1.25*pi]).';
vels = [2 0 0;
2 0 0;
-2 0 0;
-2 0 0;
2 0 0];
traj = waypointTrajectory(wps,...
'SampleRate',Fs,'ReferenceFrame','ENU', ...
'TimeOfArrival',toa,'Velocities',vels);
% Fetch pose values.
[pos,orient,vel,acc,angvel] = lookupPose(traj,toa(1):1/Fs:toa(end));
angvelBody = rotateframe(orient,angvel);
% Plot ground truth position.
figure
plot(pos(:,1),pos(:,2))
title('Position (Ground Truth)')
xlabel('X (m)')
ylabel('Y (m)')
axis equal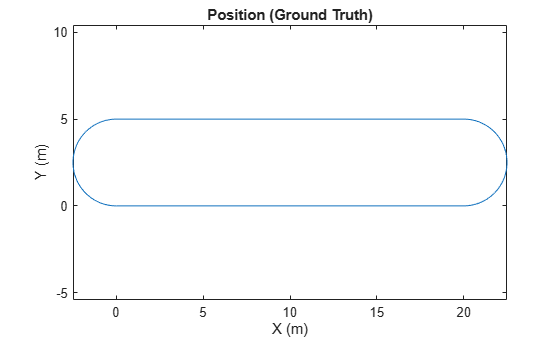
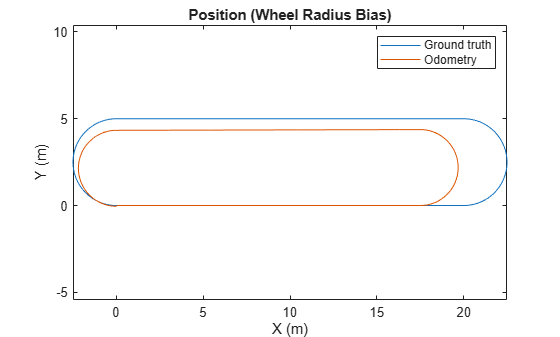
Bias in the Wheel Radius
Create a wheel encoder sensor for a unicycle model as a wheelEncoderUnicycle object. Specify a non-zero WheelRadiusBias and examine how it affects the odometry estimate. Specifying a positive bias causes the odometry algorithm to underestimate the circumference of the wheel. This results in the odometry estimating a smaller distance traveled.
encoder = wheelEncoderUnicycle; encoder.WheelRadiusBias = 0.05; odom = wheelEncoderOdometryUnicycle(encoder); ticks = encoder(vel, angvel, orient); estPose = odom(ticks, angvelBody(:,3)); % Plot ground truth and estimated positions. figure plot(pos(:,1),pos(:,2),estPose(:,1),estPose(:,2)) title('Position (Wheel Radius Bias)') xlabel('X (m)') ylabel('Y (m)') legend('Ground truth','Odometry') axis equal
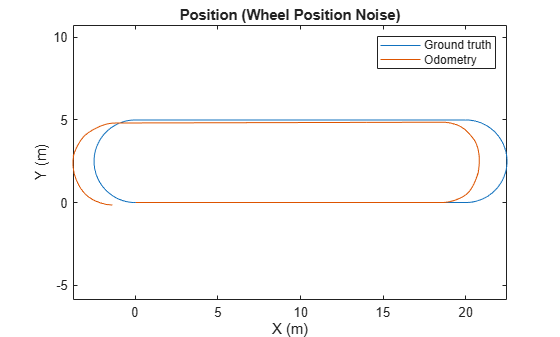
Noise in the Wheel Position Measurement
Specify a non-zero WheelPositionAccuracy and examine how it affects the odometry estimate.This noise adds random deviations to the measured ticks from the wheel encoder.
encoder = wheelEncoderUnicycle; encoder.WheelPositionAccuracy = 0.1; % Use a local random stream to reproduce results. encoder.RandomStream = 'mt19937ar with seed'; odom = wheelEncoderOdometryUnicycle(encoder); ticks = encoder(vel,angvel,orient); estPose = odom(ticks,angvelBody(:,3)); % Plot ground truth and estimated positions. figure plot(pos(:,1),pos(:,2),estPose(:,1),estPose(:,2)) title('Position (Wheel Position Noise)') xlabel('X (m)') ylabel('Y (m)') legend('Ground truth', 'Odometry') axis equal
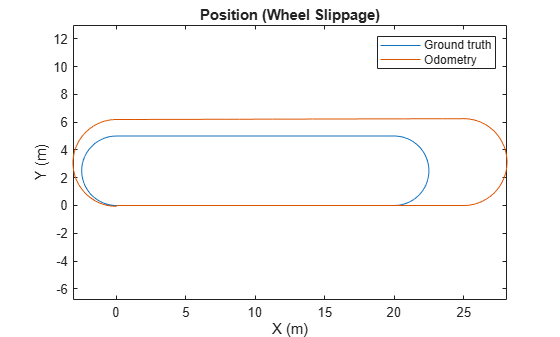
Wheel Slippage and Skidding
Specify a non-zero SlipRatio and examine how it affects the odometry estimate. Specifying a value greater than zero simulates wheel slipping. This slippage results in the odometry estimating a larger distance traveled. A negative value for slip ratio indicates skidding.
encoder = wheelEncoderUnicycle; encoder.SlipRatio = 0.25; odom = wheelEncoderOdometryUnicycle(encoder); ticks = encoder(vel, angvel, orient); estPose = odom(ticks, angvelBody(:,3)); % Plot ground truth and estimated positions. figure plot(pos(:,1),pos(:,2),estPose(:,1),estPose(:,2)) title('Position (Wheel Slippage)') xlabel('X (m)') ylabel('Y (m)') legend('Ground truth', 'Odometry') axis equal
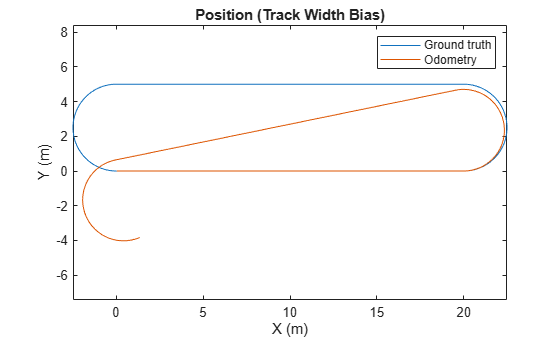
Bias in the Track Width
Specify a non-zero TrackWidthBias and examine how it affects the odometry estimate.Specifying a positive bias will cause the odometry algorithm to overestimate the turning angle of the vehicle. This overestimation of turning results in drift accumulating in the odometry estimate at turns. For this scenario, a vehicle with an axle is needed, so use the wheelEncoderDifferentialDrive object.
encoder = wheelEncoderDifferentialDrive; encoder.TrackWidthBias = 0.1; odom = wheelEncoderOdometryDifferentialDrive(encoder); ticks = encoder(vel,angvel,orient); estPose = odom(ticks); % Plot ground truth and estimated positions. figure plot(pos(:,1),pos(:,2), estPose(:,1), estPose(:,2)) title('Position (Track Width Bias)') xlabel('X (m)') ylabel('Y (m)') legend('Ground truth', 'Odometry') axis equal
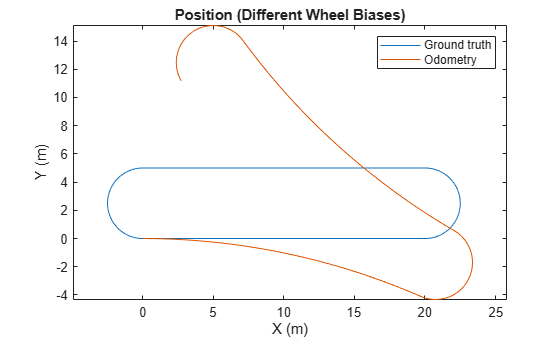
Differing Biases in the Wheels
Specify different non-zero values for the WheelRadiusBias and examine how it affects the odometry estimate.Specifying different biases causes the odometry estimate to drift throughout the entire trajectory. For this scenario, two wheels are needed, so use the wheelEncoderDifferentialDrive object.
encoder = wheelEncoderDifferentialDrive; encoder.WheelRadiusBias = [-0.01, 0.001]; odom = wheelEncoderOdometryDifferentialDrive(encoder); ticks = encoder(vel, angvel, orient); estPose = odom(ticks); % Plot ground truth and estimated positions. figure plot(pos(:,1),pos(:,2), estPose(:,1), estPose(:,2)) title('Position (Different Wheel Biases)') xlabel('X (m)') ylabel('Y (m)') legend('Ground truth', 'Odometry') axis equal