global2localcoord
Convert global to local coordinates
Syntax
Description
lclCoord = global2localcoord(___,localOrigin)localOrigin. Use this syntax with any of the input arguments in
previous syntaxes.
Examples
Input Arguments
Output Arguments
More About
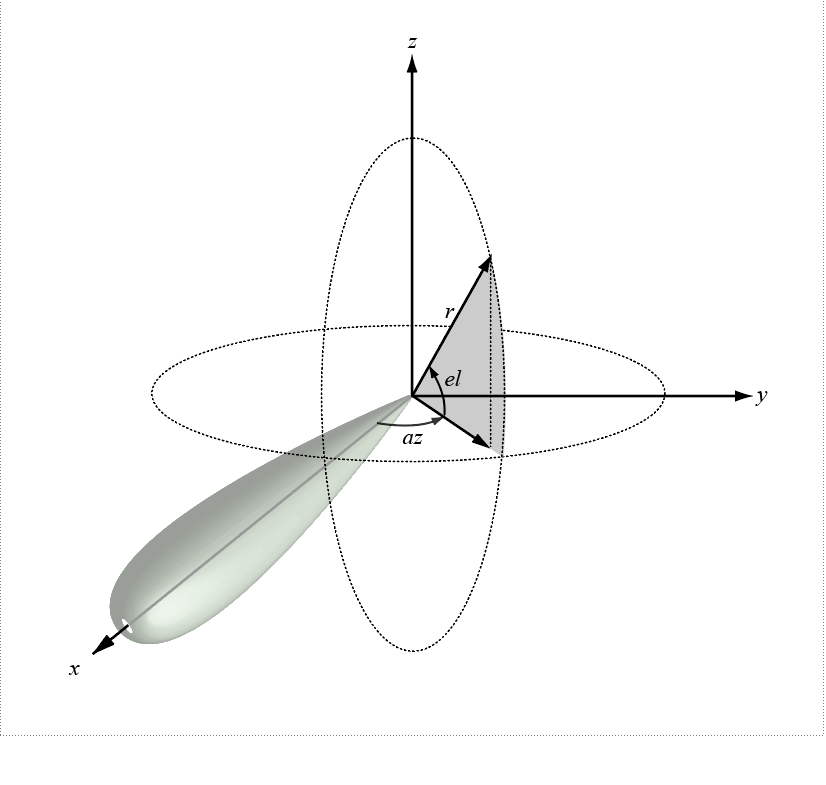
The azimuth angle of a vector is the angle between the x-axis and the orthogonal projection of the vector onto the xy-plane. The angle is positive from the x-axis toward the y-axis. Azimuth angles lie between –180 and 180 degrees. The elevation angle is the angle between the vector and its orthogonal projection onto the xy-plane. The angle is positive toward the positive z-axis from the xy-plane. By default, the boresight direction of an element or array is aligned with the positive x-axis. The boresight direction is the direction of the main lobe of an element or array.
Note
The elevation angle is sometimes defined as the angle a vector makes with the positive z-axis. The MATLAB® and Phased Array System Toolbox™ products do not use this definition.
This figure illustrates the azimuth and elevation angles of a direction vector.
References
[1] Foley, J. D., A. van Dam, S. K. Feiner, and J. F. Hughes. Computer Graphics: Principles and Practice in C, 2nd Ed. Reading, MA: Addison-Wesley, 1995.
Extended Capabilities
Version History
Introduced in R2011a
See Also
local2globalcoord | uv2azel | phitheta2azel | azel2uv | azel2phitheta | rangeangle