analyticalInverseKinematics
Create analytical inverse kinematics solver
Description
The analyticalInverseKinematics object generates functions that
computes all closed-form solutions for inverse kinematics (IK) for serial-chain manipulators.
The object uses an approach based on the Pieper method [1] to generate a custom
function to find multiple distinct joint configurations that achieve the desired end-effector
pose for a kinematic group of a rigid body tree robot model. This is applicable for a
kinematic group of a rigid body tree robot model, provided the group represents a six-DOF
serial manipulator with a wrist and compatible kinematic parameters. A wrist is defined as
three consecutive revolute joints with orthogonal axes.
These are the key elements of the solver:
Robot model — Rigid body tree model that defines the kinematics of the robot. Specify this model as a
rigidBodyTreeobject when creating the solver.Kinematic group — Base and end-effector body names for a six-DOF serial chain that is part of the robot model. To set this parameter, use the
showdetailsfunction.Kinematic group type — Classification of joints connecting base to end effector.
To see all possible supported kinematic groups for your robot, use the showdetails
object function. To set a specific group from the list, click the Use this
kinematic group link for a kinematic group in the returned list.
To calculate inverse kinematics for a specific kinematic group, use the generateIKFunction object function. To ensure your robot model and kinematic
group are compatible, check the IsValidGroupForIK property after selecting a kinematic group.
To generate numeric solutions, use the inverseKinematics and generalizedInverseKinematics objects.
Creation
Syntax
Description
analyticalIK = analyticalInverseKinematics(
creates an analytical inverse kinematics solver for a rigid body tree robot model,
specified as a robotRBT)rigidBodyTree object. The end effector is
the final body listed in the Bodies property of the robot
model. The robotRBT argument sets the RigidBodyTree property.
analyticalIK = analyticalInverseKinematics(
sets the KinematicGroup property to the robotRBT,'KinematicGroup',kinGroup)kinGroup argument,
specified as a structure.
Properties
Object Functions
generateIKFunction | Generate function for closed-form inverse kinematics |
showdetails | Display overview of available kinematic groups |
Examples
Load the robot and create the analytical inverse kinematics object.
robot = loadrobot("abbIrb120",DataFormat="row"); aik = analyticalInverseKinematics(robot);
Generate the IK function.
aikFcn = generateIKFunction(aik,"ikAbbIRB120");Solve feasible configurations for two different end-effector poses.
eePose1 = trvec2tform([0 0.25 0.25]); configs1 = aikFcn(eePose1)
configs1 = 2×6
1.8512 0.4827 0.8659 -1.2969 1.6318 2.9278
1.8512 0.4827 0.8659 1.8447 -1.6318 -0.2138
eePose2 = trvec2tform([0 -0.25 0.5]); configs2 = aikFcn(eePose2)
configs2 = 2×6
-1.8512 -0.1663 0.5766 1.4564 1.8274 4.2873
-1.8512 -0.1663 0.5766 -1.6852 -1.8274 1.1457
Generate closed-form inverse kinematics (IK) solutions for a desired end effector. Load the provided robot model and inspect details about the feasible kinematic groups of base and end-effector bodies. Generate a function for your desired kinematic group. Inspect the various configurations for a specific end-effector pose.
Robot Model
Load the ABB IRB 120 robot model into the workspace. Display the model.
robot = loadrobot('abbIrb120','DataFormat','row'); show(robot);
Analytical IK
Create the analytical IK solver. Show details for the robot model, which lists the different kinematic groups available for closed-form analytical IK solutions. Select the second kinematic group by clicking the Use this kinematic group link in the second row of the table.
aik = analyticalInverseKinematics(robot); showdetails(aik)
--------------------
Robot: (8 bodies)
Index Base Name EE Body Name Type Actions
----- --------- ------------ ---- -------
1 base_link link_6 RRRSSS Use this kinematic group
2 base_link tool0 RRRSSS Use this kinematic group
Inspect the kinematic group, which lists the base and end-effector body names. For this robot, the group uses the 'base_link' and 'tool0' bodies, respectively.
aik.KinematicGroup
ans = struct with fields:
BaseName: 'base_link'
EndEffectorBodyName: 'tool0'
Generate Function
Generate the IK function for the selected kinematic group. Specify a name for the function, which is generated and saved in the current directory.
generateIKFunction(aik,'robotIK');Specify a desired end-effector position. Convert the xyz-position to a homogeneous transformation.
eePosition = [0 0.5 0.5]; eePose = trvec2tform(eePosition); hold on plotTransforms(eePosition,tform2quat(eePose)) hold off
Generate Configuration for IK Solution
Specify the homogeneous transformation to the generated IK function, which generates all solutions for the desired end-effector pose. Display the first generated configuration to verify that the desired pose has been achieved.
ikConfig = robotIK(eePose); % Uses the generated file show(robot,ikConfig(1,:)); hold on plotTransforms(eePosition,tform2quat(eePose)) hold off
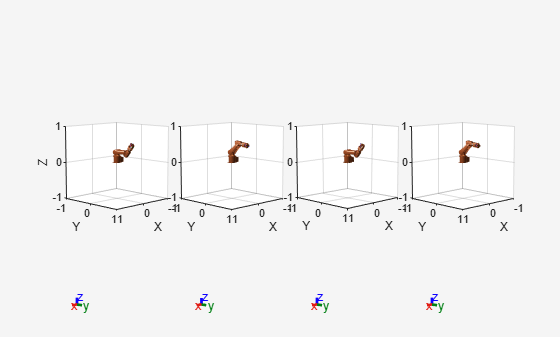
Display all of the closed-form IK solutions sequentially.
figure; numSolutions = size(ikConfig,1); for i = 1:size(ikConfig,1) subplot(1,numSolutions,i) show(robot,ikConfig(i,:)); end
Some manipulator robot models have large degrees-of-freedom (DOFs). To reach certain end-effector poses, however, only six DOFs are required. Use the analyticalInverseKinematics object, which supports six-DOF robots, to determine various valid kinematic groups for this large-DOF robot model. Use the showdetails object function to get information about the model.
Load Robot Model and Generate IK Solver
Load the robot model into the workspace, and create an analyicalInverseKinematics object. Use the showdetails object function to see the supported kinematic groups.
robot = loadrobot("willowgaragePR2",DataFormat="row"); aik = analyticalInverseKinematics(robot); opts = showdetails(aik);
--------------------
Robot: (94 bodies)
Index Base Name EE Body Name Type Actions
----- --------- ------------ ---- -------
1 l_shoulder_pan_link l_wrist_roll_link RSSSSS Use this kinematic group
2 r_shoulder_pan_link r_wrist_roll_link RSSSSS Use this kinematic group
3 l_shoulder_pan_link l_gripper_palm_link RSSSSS Use this kinematic group
4 r_shoulder_pan_link r_gripper_palm_link RSSSSS Use this kinematic group
5 l_shoulder_pan_link l_gripper_led_frame RSSSSS Use this kinematic group
6 l_shoulder_pan_link l_gripper_motor_accelerometer_link RSSSSS Use this kinematic group
7 l_shoulder_pan_link l_gripper_tool_frame RSSSSS Use this kinematic group
8 r_shoulder_pan_link r_gripper_led_frame RSSSSS Use this kinematic group
9 r_shoulder_pan_link r_gripper_motor_accelerometer_link RSSSSS Use this kinematic group
10 r_shoulder_pan_link r_gripper_tool_frame RSSSSS Use this kinematic group
Select a group programmatically using the output of the showdetails object function, opts. The selected group uses the left shoulder as the base with the left wrist as the end effector.
aik.KinematicGroup = opts(1).KinematicGroup; disp(aik.KinematicGroup)
BaseName: 'l_shoulder_pan_link'
EndEffectorBodyName: 'l_wrist_roll_link'
Generate the IK function for the selected group.
generateIKFunction(aik,"willowRobotIK");Solve Analytical IK
Define a target end-effector pose using a randomly-generated configuration.
rng(0); expConfig = randomConfiguration(robot); eeBodyName = aik.KinematicGroup.EndEffectorBodyName; baseName = aik.KinematicGroup.BaseName; expEEPose = getTransform(robot,expConfig,eeBodyName,baseName);
Solve for all robot configurations that achieve the defined end-effector pose using the generated IK function. To ignore joint limits, specify false as the second input argument.
ikConfig = willowRobotIK(expEEPose,false);
To display the target end-effector pose in the world frame, get the transformation from the base of the robot model, rather than the base of the kinematic group.
eeWorldPose = se3(getTransform(robot,expConfig,eeBodyName)); generatedConfig = repmat(expConfig,size(ikConfig,1),1); generatedConfig(:,aik.KinematicGroupConfigIdx) = ikConfig;
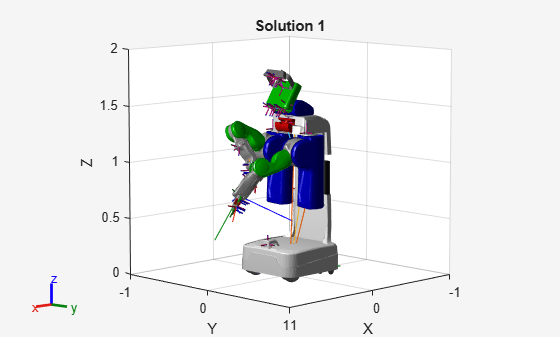
Display the first generated IK solution.
ax = show(robot,generatedConfig(1,:)); hold on plotTransforms(eeWorldPose,Parent=ax,FrameSize=0.5); axis([-1 1 -1 1 0 2]) title("Solution 1");
References
[1] Pieper, Donald. The Kinematics of Manipulators Under Computer Control. Stanford University, 1968.
Extended Capabilities
Version History
Introduced in R2020b