Select Interface for Connecting to Kinova Gen3 Robot
Use matlab_kortex API and MATLAB
This interface uses matlab_kortex API (provided by Kinova® Robotics) and MATLAB® to communicate with the robot.
This interface is ideal for use-cases where the intended end goal involves standalone manipulation of the Gen3 robot only. The hardware support package lets you acquire various sensor data from the robot manipulator, control the robot manipulator, connect with the robot hardware to test and validate your algorithms, prototype robot manipulator algorithms, and simulate robot manipulators using rigid body tree models from Robotics System Toolbox™.
This interface is supported on Windows® and Linux® operating systems and requires a valid installation of Robotics System Toolbox. If you are planning to use vision sensors of the robot then a valid installation of Image Acquisition Toolbox is also required. To know more about the capabilities and features of this interface, watch the video Developing a Pick-And-Place Application in MATLAB and Simulink and refer the examples.
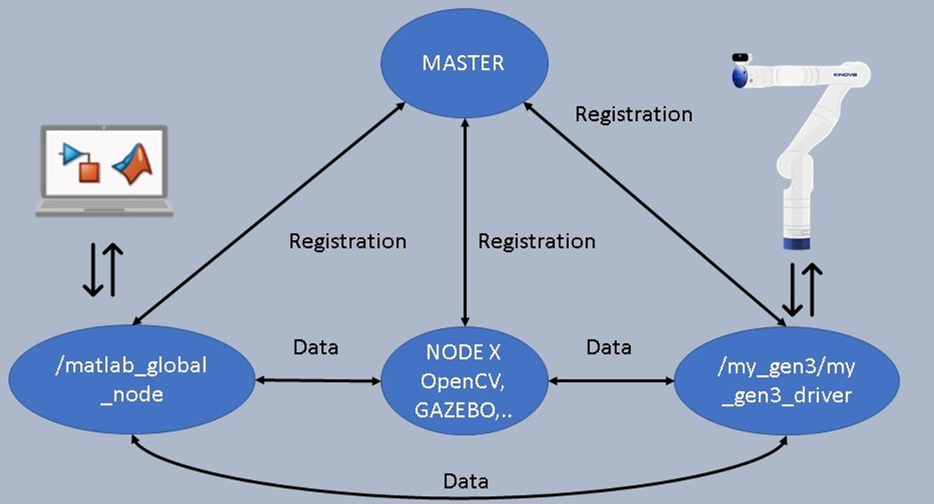
Use ros_kortex ROS packages, MATLAB, ROS, and ROS Toolbox
This interface uses ros_kortex ROS packages (provided by Kinova Robotics), MATLAB, ROS and ROS Toolbox to communicate with the robot.
In many robotics use-cases, the environment consists of multiple robots and sensors, and the standalone manipulation is not common. In such scenarios, ROS is widely used due to inherent advantages of hardware abstraction, device drivers, libraries, visualizers, message-passing, package management, and more. This interface is ideal for use-cases where the manipulator is part of the existing ROS network. With this interface Robotics System Toolbox™ features can be used to Simulate and generate trajectories for Kinova Gen 3 robot and then the robot can be controlled using various ROS services and actions using ROS Toolbox.
This feature is supported for Windows and Linux operating systems and requires a valid installation of Robotics System Toolbox and ROS Toolbox. However, the automatic hardware setup via hardware setup screens is only available for Linux 18.04 and 16.04 operating systems.
Special Considerations for Linux OS
Automatic hardware setup screens guide you to configure the host computer to communicate with the robot via ROS if the MATLAB and ROS are installed on the same host computer.
If the MATLAB and ROS are installed on a different machine, then refer to Install ROS Packages and Dependencies for ROS on External Computer to configure the host computer and the ROS computer manually.
Special Considerations for Windows OS
You can use Linux VMprovided by the MathWorks on the host computer with Windows OS and the MATLAB to control the robot using ROS. Refer to Install ROS Packages and Dependencies for ROS on External Computer configure the host computer and the VM manually.
If the robot is connected to a separate machine having Linux with ROS and needs to be controlled using the MATLAB installed on a Windows host computer, then refer to Install ROS Packages and Dependencies for ROS on External Computer to configure the host computer and the ROS computer manually.