Install MATLAB URCap for External Control
MathWorks® provides a URCap file named
matlab_externalcontrol-1.0.0.urcap, which allows external control
for the Universal Robots UR Series cobots. The source files are located at the
GitHub® location MATLAB-URCap-for-External-Control.
Download
matlab_externalcontrol-1.0.0.urcapfrom here, corresponding to your MATLAB® release to your local computer. After downloading, copy the file to a USB flash drive.
Remove the USB flash drive from the host computer and insert it to USB port of the Teach Pendant.

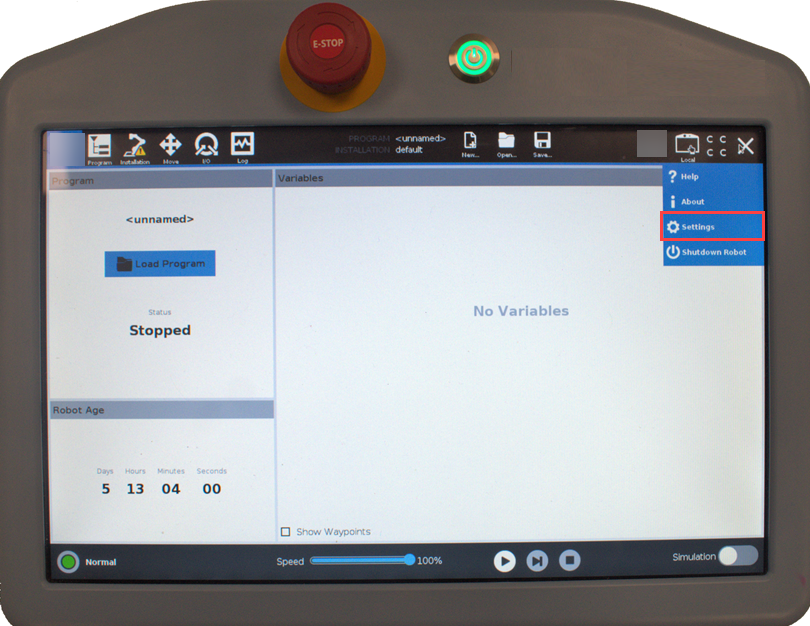
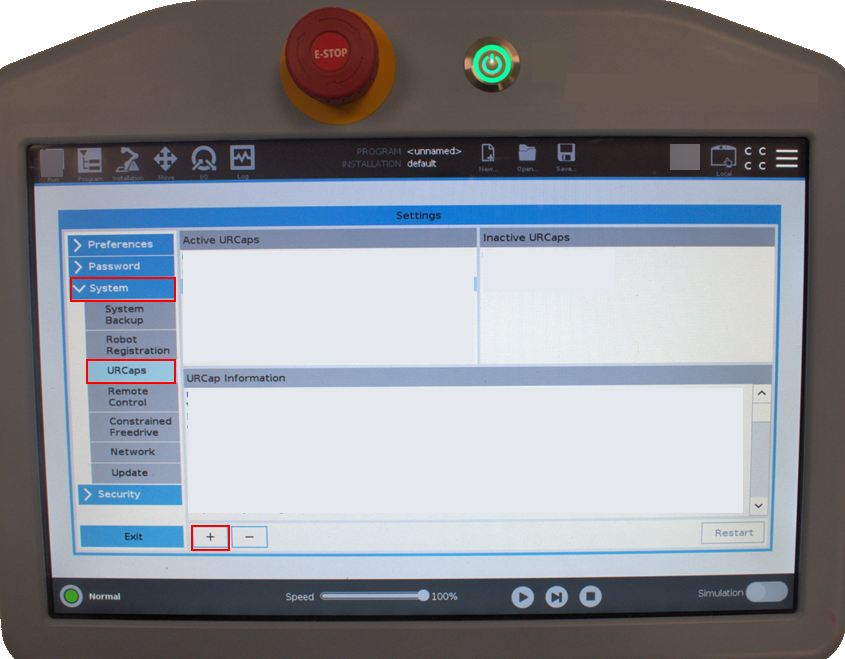
In the graphical interface of Teach Pendant, click the toggle menu at the top right corner, select Settings, and then select System > URCaps.
Click the plus sign at the bottom of the interface to open the file selector.
In the file selector, select the
matlab_externalcontrol-1.0.0.urcapfile from the USB flash drive, and click Open. The URCaps view is updated to display MATLAB URCap for External Control in the list of Active URCaps.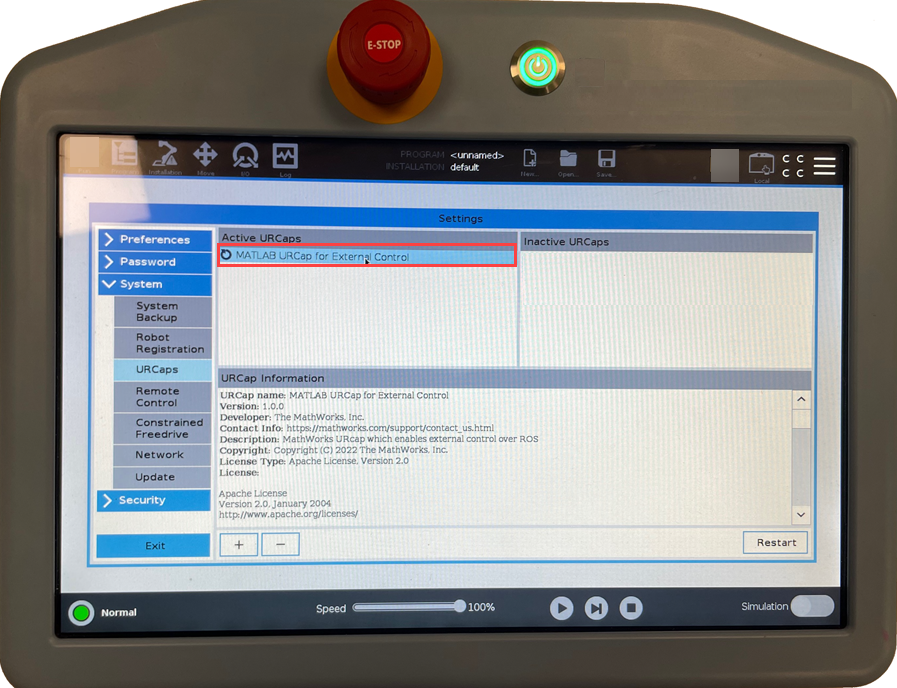
A notification to restart the robot appears. Reboot the robot now.
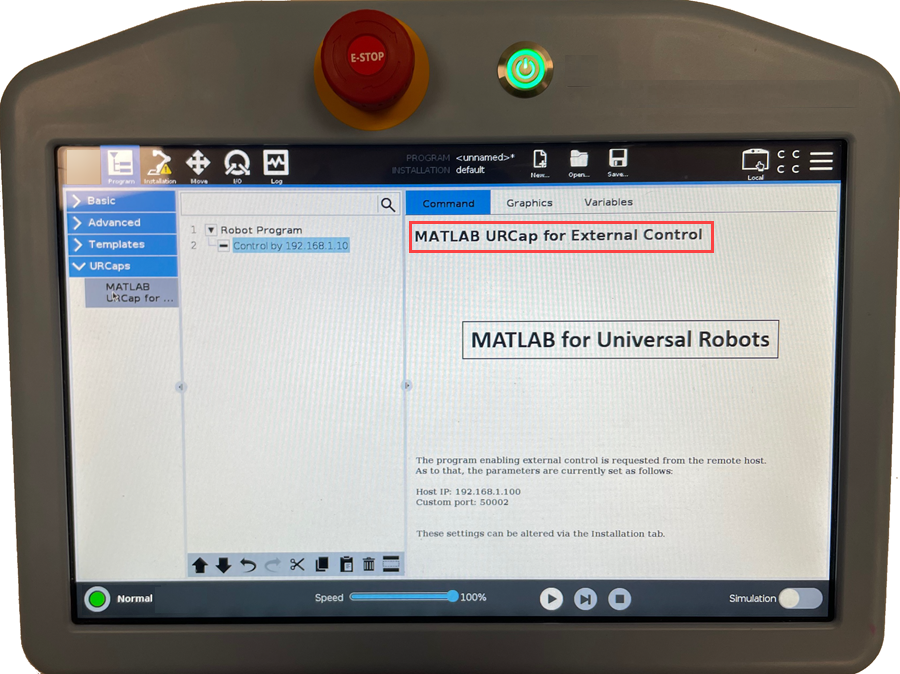
After the reboot, select the program menu and select Installation tab. The MATLAB URCap for External Control configuration appears on the screen.
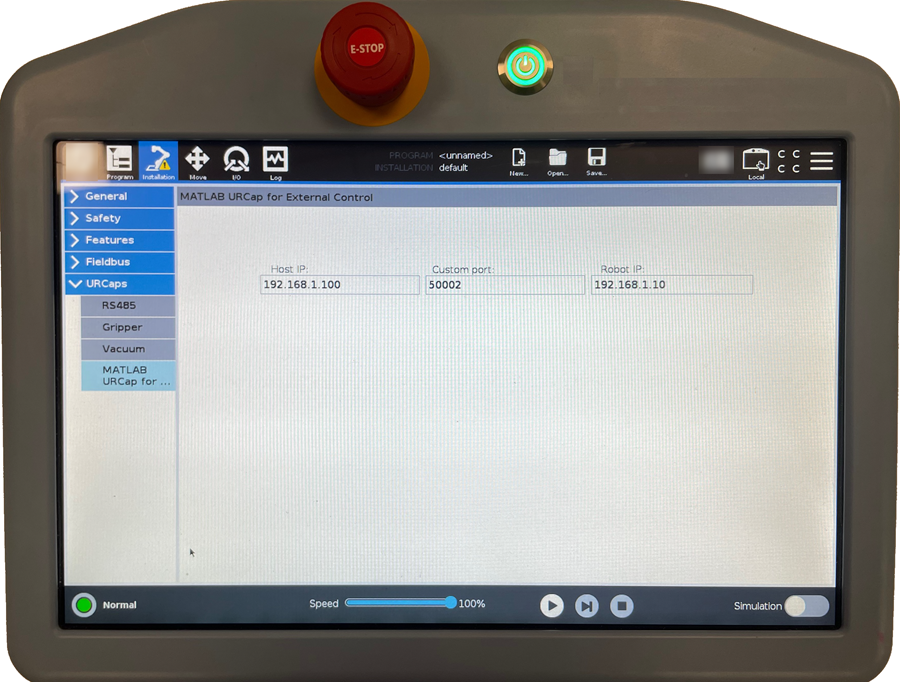
Enter the IP address of the external PC which will be running the ROS driver (
192.168.1.100, as per one of the previous steps). The robot and the external PC must be in the same network. You can leave the custom port at its default value.To use the new URCaps, create a new program and insert the MATLAB URCap for External Control program node into the program tree.
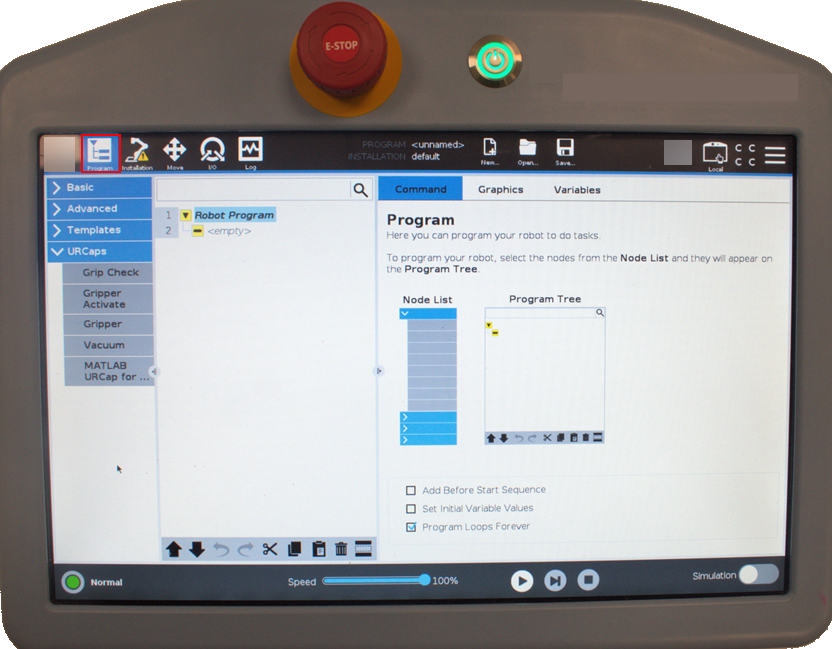
If you click on the command tab again, you can see the settings entered inside the Installation screen. Verify that they are correct, then save the program.