ncfmr
(Not recommended) Model reduction from normalized coprime factorization
ncfmr is not recommended. Use reducespec
instead. (since R2023b) For more information on updating your code, see Version History.
Description
ncfmr computes a reduced-order approximation of a model by
truncating modes in a coprime factorization of the full-order model. This method is related to
the balanced truncation method, but it is particularly well-suited to controller order
reduction. For a stabilizing controller, the reduced controller is also stabilizing as long as
the approximation error is smaller than the robustness margin computed by
ncfmargin.
[
computes a reduced-order approximation of the dynamic system model Gred,info] = ncfmr(G,ord)G.
Specify the desired reduction order as ord. If ord
is a vector, then Gred is an array of approximations of the
corresponding order. The structure info contains information about the
computation such as bounds on the approximation error.
[~,
computes the coprime factorization of info] = ncfmr(G)G given by
[M,N] such that G = M\N (see lncf), the
Hankel singular values of the factorization, and the error bounds. You can use this
information to determine the target reduction order programmatically based on desired
fidelity or robust stability considerations. Then, use the syntax Gred =
ncfmr(G,ord,info) to compute the reduced-order model.
Gred = ncfmr(G,ord,info)info. Obtain
info using the previous syntax, [~,info] =
ncfmr(G). Providing a previously computed info to
ncfmr allows you to perform model reduction without having to
recompute the factorization and Hankel singular values. This syntax is therefore
particularly useful when performance is a concern.
ncfmr(G) plots the Hankel singular values and bounds on the
approximation error corresponding to each order. Examine the plot to determine a reduced
order based on desired fidelity or robust stability considerations. You can then use
Gred = ncfmr(G,ord) to compute the reduced-order model.
Examples
Input Arguments
Output Arguments
Tips
You can use
ncfmrto reduce the plant G or controller K while preserving closed-loop stability of the following SISO or MIMO feedback loop.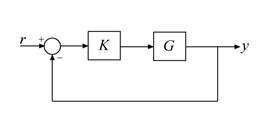
Stability of this loop is preserved as long as the approximation error of the reduced plant is smaller than the robustness margin for this loop given by
ncfmargin(G,K).For controllers computed with
ncfsyn, reducing the controller Ks thatncfsyncomputes for the shaped controller Gs is preferable. Both Ks and Gs are returned byncfsynin theinfooutput argument. You can then compute Kr, the reduced controller for the original plant G, from Kr = W1KsrW2, where W1 and W2 are the shaping weights used withncfsyn.For controllers obtained by other techniques, reduction with
ncfmralso preserves stability if the error does not exceed thencfmarginmargin. However, such reduction can partially remove integral action and introduce steady-state tracking errors. Therefore, removing any integrator terms from the controller before reduction withncfmrand replacing them in the reduced controller is recommended.
Algorithms
ncfmr performs the following steps to reduce the input model
G to the desired order k.
Version History
Introduced before R2006aSee Also
reducespec | lncf | ncfsyn | ncfmargin