simscape.multibody.PlanarJoint Class
Namespace: simscape.multibody
Superclasses: simscape.multibody.Joint
Description
Use an object of the simscape.multibody.PlanarJoint class to construct a
planar joint. The object models a 2-D transformation of the follower frame with respect to the
base frame in the xy-plane of the base frame. The transformation includes
two translations and one rotation that follow the sequence, as shown in the image.
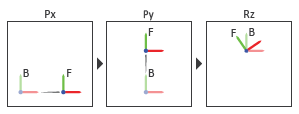
First, the follower frame moves along the x and y axes of the base frame, respectively, and then rotates about the z-axis of the follower frame generated after the translations. The origin of the follower frame lies on the xy-plane of the base frame, and the z-axes of the base and follower frames remain parallel.
The properties of the PlanarJoint object contain two simscape.multibody.PrismaticPrimitive objects and one simscape.multibody.RevolutePrimitive object.
Class Attributes
Sealed | true |
ConstructOnLoad | true |
RestrictsSubclassing | true |
For information on class attributes, see Class Attributes.
Creation
Description
pj = simscape.multibody.PlanarJoint
Properties
Version History
Introduced in R2022a