viewSolution
Open Multibody Explorer to visualize KinematicsSolver solution
Syntax
Description
viewSolution( opens the Multibody Explorer to
visualize the mechanism corresponding to the latest solution computed by the ks)solve method for the KinematicsSolver object
ks.
Note
An error occurs if the
solvefunction was not invoked before calling theviewSolutionfunction.If the
statusFlagcorresponding to the last call to solve is -3, the state returned by the solver is not kinematically feasible. In this case, the mechanism rendered in the viewer is not physically realizable.
Examples
Open the example and create a KinematicsSolver object for the double pendulum model.
mdl = "DoublePendulum";
load_system(mdl);
ks = simscape.multibody.KinematicsSolver(mdl);List all of the joint position variables.
jointPositionVariables(ks)
ans=2×4 table
ID JointType BlockPath Unit
_________ ________________ _______________________________ _____
"j1.Rz.q" "Revolute Joint" "DoublePendulum/Lower Revolute" "deg"
"j2.Rz.q" "Revolute Joint" "DoublePendulum/Upper Revolute" "deg"
Assign the upper and lower revolute joint angles as target variables.
targetIDs = ["j1.Rz.q";"j2.Rz.q"]; addTargetVariables(ks,targetIDs);
Solve the forward kinematics problem with given joint angles.
targets = [90,0]; outputVec = solve(ks,targets);
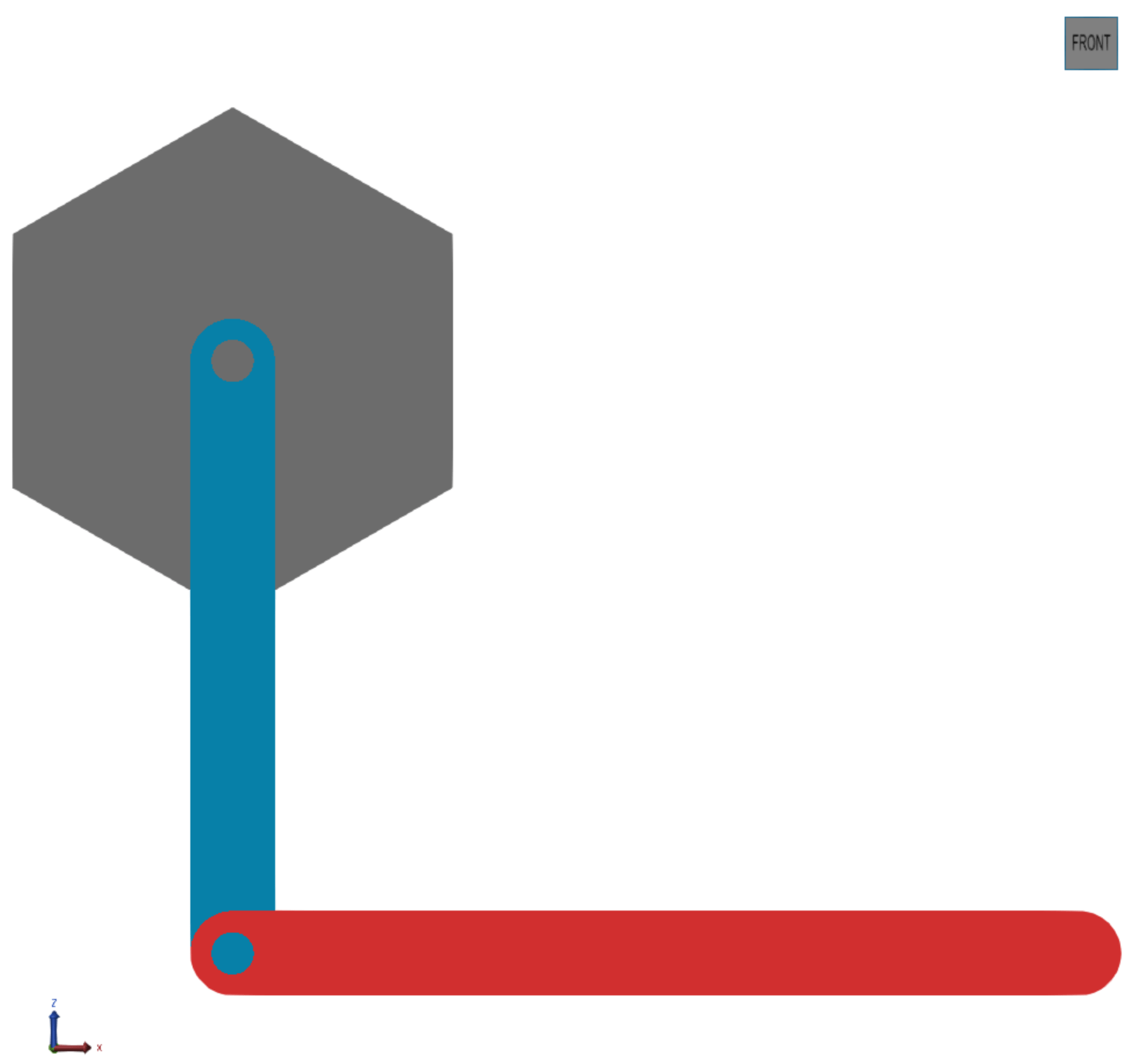
Open the Kinematics Solver Viewer. At the MATLAB® command prompt, enter:
viewSolution(ks);
Click the Front view button to view the solution.
Close the viewer.
closeViewer(ks);
Input Arguments
Version History
Introduced in R2020a