Electric Drives Models
The Electric Drives models are designed for engineers from many disciplines who want to incorporate easily and accurately electric drives in the simulation of their systems. The interface presents the parameters of the selected drive in a system-look topology, thereby simplifying the adjustments users may want to bring to the default values. Then they can seamlessly use any other toolboxes or blocksets to analyze the time or frequency behavior of the electric drive interacting with its system. The models are most helpful when a powerful drive has to be carefully maneuvered without ignoring the operating limits of the load on one side and of the power source on the other side. A good example is the electric drive system of a hybrid car that can switch in milliseconds from driving the wheels to recharging the batteries when the brakes are engaged.
Engineers and scientists can work readily with the seven typical direct current (DC) drives used in industries and transportation systems, eight alternating current (AC) drives providing more efficient and versatile motors from traction to positioning devices, and shaft and speed reducer models useful for connecting to the motor a model of load made of Simulink® blocks. An added value of the models are parameters that assure the validity of the motor, the power converters, and the control system. Particular attention was devoted to the motor models by comparing the models' behavior to the published data of the major manufacturers. Numerous examples or case studies of typical drives are supplied with the models. Hopefully, typical user systems are similar to these analyzed systems, thereby saving time in building the practical system and supplying a known reference point in the analysis.
To access the Electric Drives models, at the MATLAB® command prompt, enter:
electricdrivelib
What Is an Electric Drive?
An electric drive is a system that performs the conversion of electric energy into mechanical energy at adjustable speeds. This is the reason why an electric drive is also called adjustable speed drive (ASD). Moreover, the electric drive always contains a current (or torque) regulation to provide safe current control for the motor. Therefore, the electric drive torque/speed is able to match in steady state the torque/speed characteristics of any mechanical load. This motor to mechanical load match means better energy efficiency and leads to lower energy costs. In addition, during the transient period of acceleration and deceleration, the electric drive provides fast dynamics and allows soft starts and stops, for instance.
A growing number of applications require that the torque and speed vary to match the mechanical load. Electric transportation means, elevators, computer disk drives, machine tools, and robots are examples of high-performance applications where the desired motion versus time profile must be tracked very precisely. Pumps, fans, conveyers, and HVAC are examples of moderate performance applications where variable-speed operation means energy savings.
Electric Drive Components
An electric drive consists of these main components:
Electric motor
Power electronic converter
Drive controller
This diagram shows the basic topology of an electric drive.
Electric Drive Basic Topology

The motor used in an electric drive is either a direct current (DC) or an alternating current (AC) motor. The type of motor used defines the electric drive's classification into DC motor drives and AC motor drives.
The power electronic converter produces variable AC voltage and frequency from the electric power source. There are many types of converters depending on the type of electric drive. The DC motor drives are based on phase-controlled rectifiers (AC-DC converters) or on choppers (DC-DC converters), while the AC motor drives use inverters (DC-AC converters) or cyclo converters (AC-AC converters). The basic component of all the power electronic converters is the electronic switch, which is either semicontrolled (controllable on-state), as in the case of the thyristor, or fully controllable (controllable on-state and off-state), as in the cases of the IGBT (insulated gate bipolar transistor) and the GTO (gate turn off thyristor) blocks. The controllable feature of the electronic switch is what allows the converter to produce the variable AC voltage and frequency.
The purpose of the drive controller is to convert the desired drive torque/speed profile into triggering pulses for the electronic power converter, taking into account various drive variables (currents, speed, and so on) fed back by the sensors. To accomplish this conversion, the controller is based first on a current (or torque) regulator. The current regulator is mandatory because it protects the motor by precisely controlling the motor currents. The set point (SP) of this regulator can be supplied externally if the drive is in torque regulation mode, or internally by a speed regulator if the drive is in speed regulation mode. In the Electric Drives models, the speed regulator is in series with the current regulator and is based on a PI controller that has three important features:
The SP rate of change is limited so that the desired speed ramps gradually to the SP, in order to avoid sudden step changes.
The speed regulator output that is the SP for the current regulator is limited by maximum and minimum ceilings.
The integral term is also limited in order to avoid wind-up. The following figure shows a block diagram of a PI controller-based speed controller.
PI Controller-Based Speed Regulator

Multiquadrant Operation
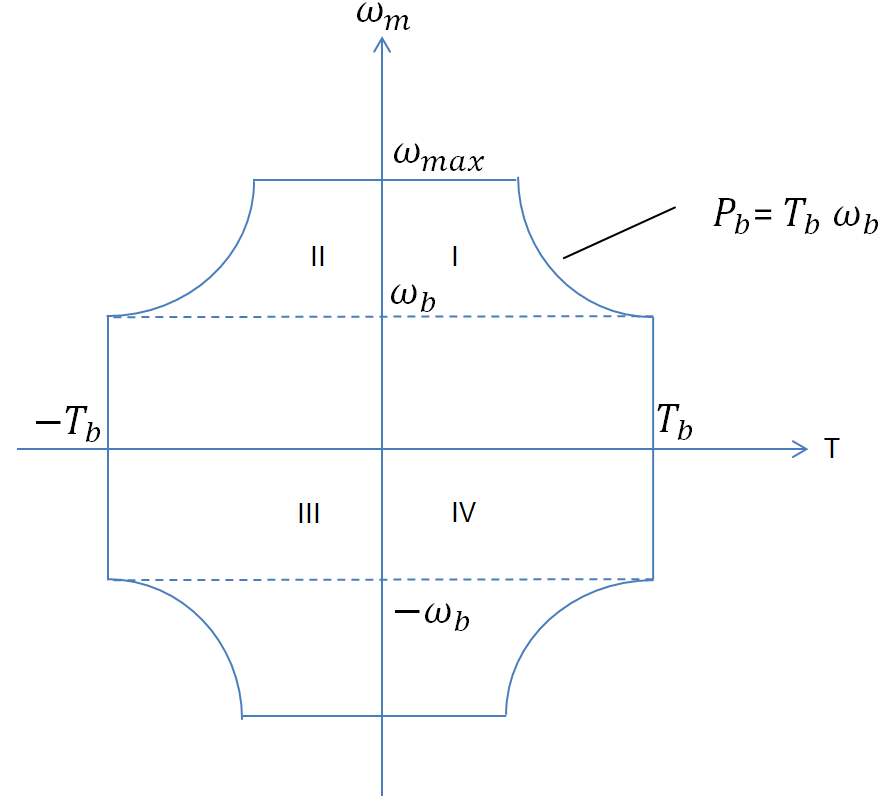
For each electric drive application, the mechanical load to be driven has a specific set of requirements. The torque/speed possibilities of the electric drive can be represented as a speed versus torque graph consisting of four quadrants. In the first quadrant, the electric torque and the speed signs are both positive, indicating forward motoring since the electric torque is in the direction of motion. In the second quadrant, the electric torque sign is negative and the speed sign is positive, indicating forward braking since the electric torque is opposite to the direction of motion. In the third quadrant, the electric torque and speed signs are both negative, indicating reverse motoring. In the fourth quadrant, the electric torque sign is positive and the speed is negative, indicating reverse braking. The drive braking is handled either by a braking chopper (dynamic braking) or by bidirectional power flow (regenerative braking).
This diagram illustrates the four-quadrant operating region of an electric drive. Each quadrant has a constant torque region from 0 to +/- nominal speed ωb and a region where the torque decreases inversely with the speed from ωb to the maximum speed ωmax. This second region is a constant power region and is obtained by decreasing the motor magnetic flux.
Four-Quadrant Operation of an Electric Drive
Average-Value Models
The Electric Drives models allow two levels of simulation — detailed simulations or average-value simulations. The detailed simulations use the Universal Bridge block to represent the detailed behavior of rectifier- and inverter-controlled drives. This simulation level requires small simulation time steps to achieve correct representation of the high frequency electrical signal components of the drives.
The average-value simulations use average-value models of the power converters. When simulating in average-value mode, the electrical input and output currents and voltages of the power converters driving the electrical motors represent the average values of the real-life currents and voltages. By doing so, the high frequency components are not represented and the simulations can use much bigger time steps. Each power converter average-value model is described in the documentation for each DC or AC model type. The time step used in a drive at average-value level can usually be increased up to the smallest controller sampling time used in a model. For example, if a drive uses a 20 μs time step for the current loop and a 100 μs time step for the speed loop, then the simulation time step in average-value mode can be increased up to 20 μs. Simulation time step guidelines are given in the documentation for each model.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)