Autopilot Hardware Interface
Generate and deploy flight control algorithms to autopilots that run PX4 and ArduPilot software, such as Pixhawk® Cube Orange and 6c. Run software-in-the-loop (SITL) and hardware-in-the-loop (HITL) simulations to verify flight control algorithms. Communicate with autopilot hardware using Micro Air Vehicle Link (MAVLink) communication protocol. For a full list of supported autopilots, see Supported PX4 Autopilots.
Categories
- UAV Toolbox Support Package for PX4 Autopilots
Access PX4 autopilot peripherals with UAV Toolbox, automatically build and deploy flight control algorithms using Embedded Coder®
- UAV Toolbox Support
Package for ArduPilot
Autopilots
Access ArduPilot autopilot peripherals with UAV Toolbox and automatically build and deploy flight control algorithms with Embedded Coder
- MAVLink Support
Micro Air Vehicle Link communication protocol dialects and messages
Featured Examples

Read GPS Data from PX4 Autopilot
Read GPS data from PX4 autopilot in Simulink using GPS block.
Design and Tune Quadcopter Position Controller for PX4 Autopilot
Use the UAV Toolbox Support Package for PX4® Autopilots to design a position controller for a quadcopter.

Receive Mission and Flight Parameter Data in Simulink Using MAVLink Microservices
Implement MAVLink Microservices in Simulink to receive mission and flight parameter data from QGroundControl.

Design Quadrotor Position and Attitude Controllers for ArduCopter
Use the UAV Toolbox Support Package for ArduPilot® Autopilots to design position and attitude controller for ArduCopter in Simulink®. This example is designed to run with the ArduPilot Host Target, allowing you to perform Software-in-the-Loop (SITL) simulation.
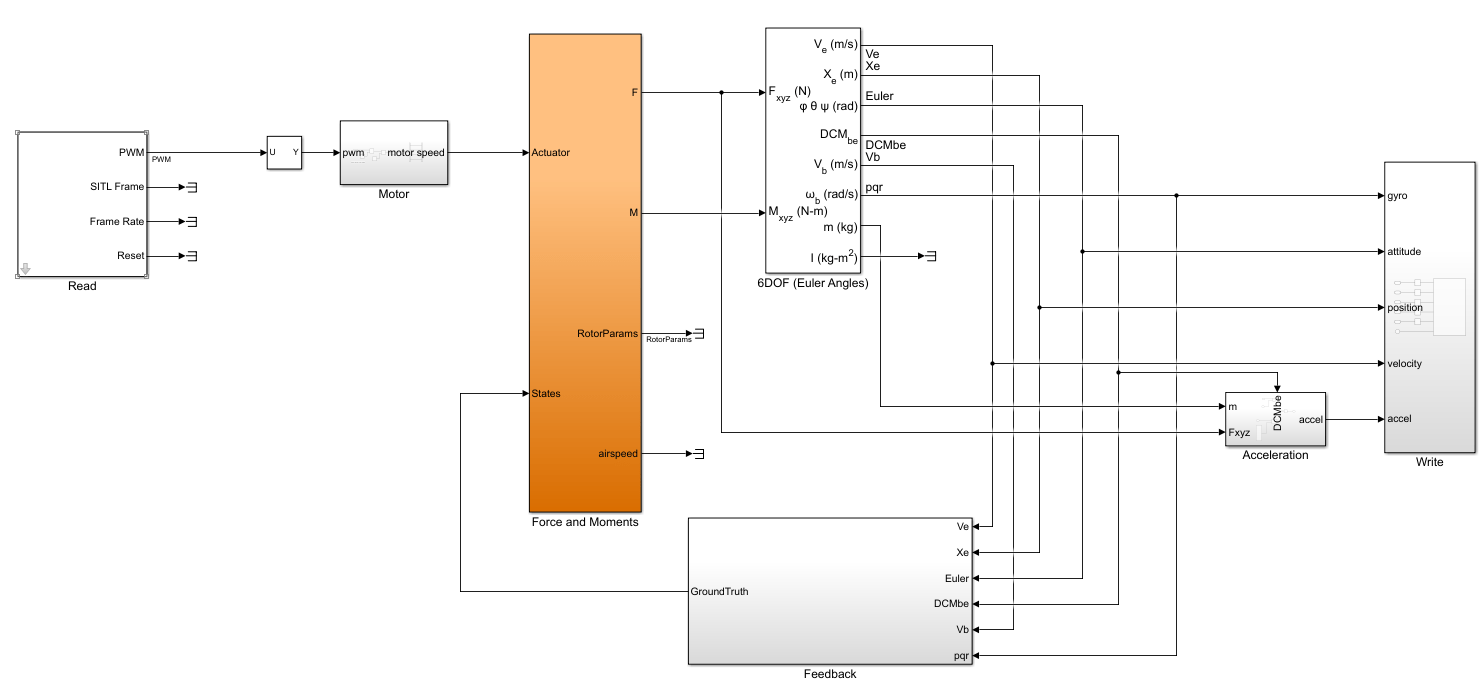
Run ArduPilot Software-in-the-Loop Simulation with Quadcopter Plant in Simulink
Verify a quadcopter controller design by using Software-in-the-Loop (SITL) simulation and simulating the quadcopter plant model in Simulink.