vision.BlockMatcher
Estimate motion between images or video frames
Description
To estimate motion between images or video frames.
Create the
vision.BlockMatcherobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
blkMatcher = vision.BlockMatcherblkMatcher, that estimates motion between two images or
two video frames. The object performs this estimation using a block matching method by
moving a block of pixels over a search region.
blkMatcher = vision.BlockMatcher(Name,Value)blkMatcher =
vision.BlockMatcher('ReferenceFrameSource','Input port')
Properties
Usage
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object™ as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Read and convert an RGB image to grayscale.
img1 = im2double(im2gray(imread("onion.png")));Create a block matcher and alpha blender object.
hbm = vision.BlockMatcher("ReferenceFrameSource",... "Input port","BlockSize",[35 35]); hbm.OutputValue = "Horizontal and vertical components in complex form";
Offset the first image by [5 5] pixels to create a second image.
img2 = imtranslate(img1,[5,5]);
Compute motion for the two images.
motion = hbm(img1,img2);
Blend the two images.
img12 = imblend(img1,img2);
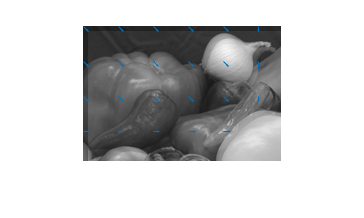
Use a quiver plot to show the direction of motion on the images.
[X,Y] = meshgrid(1:35:size(img1,2),1:35:size(img1,1)); imshow(img12) hold on quiver(X(:),Y(:),real(motion(:)),imag(motion(:)),0) hold off
Version History
Introduced in R2012a
See Also
opticalFlow | opticalFlowFarneback | opticalFlowHS | opticalFlowLK | opticalFlowLKDoG