Quadcopter External Environment
This section outlines how atmospheric and geophysical conditions influence quadcopter
behavior and explains how these factors are represented through constant or variable
environment models within the workflow.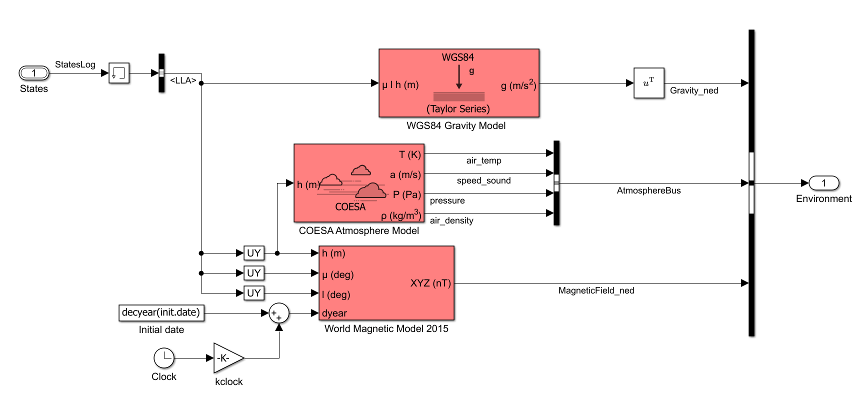
Environment
The environment in which a Parrot® quadcopter minidrone operates can vary widely, ranging from indoor settings to outdoor environments. Understanding the environment is crucial for safe and effective drone operation.
The environmental parameters considered in this workflow are:
Gravity — Gravity plays a fundamental role in the flight dynamics of the drone. It affects the weight, lift, and overall stability of the drone during flight. The force of gravity influences the ability of the drone to ascend, descend, and maintain altitude, as well as its overall maneuverability.
Air temperature — Air temperature affects the air density, which in turn impacts the aerodynamic performance of the drone. As temperature increases, air density decreases, affecting lift and drag forces on the drone. Additionally, temperature changes can influence the efficiency of the propulsion system of the drone.
Speed of sound — The speed of sound in the surrounding air affects the propagation of acoustic signals, including those used for communication and telemetry. Changes in the speed of sound due to temperature and pressure variations can impact the acoustic sensors of the drone and communication systems.
Pressure — Air pressure influences the aerodynamic forces acting on the drone. Changes in air pressure affect lift, drag, and overall aerodynamic performance. Additionally, variations in air pressure can impact altitude measurements and barometric sensors used for altitude hold and navigation.
Air density — Air density directly affects the aerodynamic performance of the drone. Lower air density reduces lift and increases the required airspeed for the same amount of lift. Changes in air density due to altitude or temperature variations influence the flight characteristics and performance of the drone.
Magnetic field — The magnetic field of the Earth affects the onboard magnetometer of the drone, which is used for orientation and navigation. Variations in the magnetic field due to geographic location and local magnetic anomalies can impact the accuracy of the compass of the drone and its ability to maintain heading and orientation.
Two options are available for the implementation of the environment models.
Constant — In the constant environment model, the environmental parameters are fixed at their standard sea-level values. Set
VSS_ENVIRONMENTto 0 for the constant environment model.Variable — In the variable environment model, the latitude, longitude, and altitude (LLA) coordinates of the vehicle obtained in States from the
Airframesubsystem are used as input to different environment blocks from the Aerospace Blockset™ to obtain the different atmospheric parameters. SetVSS_ENVIRONMENTto 1 for the variable environment model.The WGS84 gravity model is used to compute the gravity of the Earth at a specific location.
The COESA Atmosphere model is used to obtain the temperature, speed of sound, pressure and density of air based on the altitude input.
The World Magnetic Model 2015 is used to calculate the magnetic field of the Earth at a specific location and time.
To include these models, you can change the VSS_ENVIRONMENT
variable in the workspace to toggle between variable and constant environment
models.
See Also
World Magnetic Model | COESA Atmosphere Model | WGS84 Gravity Model