Upsample Discrete-Time System
This example shows how to upsample a system using both the d2d and upsample commands and compare the results of both to the original system.
Upsampling a system can be useful, for example, when you need to implement a digital controller at a faster rate than you originally designed it for.
Create the discrete-time system
with a sample time of 0.3 s.
G = tf([1,0.4],[1,-0.7],0.3);
Resample the system at 0.1 s using d2d.
G_d2d = d2d(G,0.1)
G_d2d = z - 0.4769 ---------- z - 0.8879 Sample time: 0.1 seconds Discrete-time transfer function. Model Properties
By default, d2d uses the zero-order-hold (ZOH) method to resample the system. The resampled system has the same order as G.
Resample the system again at 0.1 s, using upsample.
G_up = upsample(G,3)
G_up = z^3 + 0.4 --------- z^3 - 0.7 Sample time: 0.1 seconds Discrete-time transfer function. Model Properties
The second input, 3, tells upsample to resample G at a sample time three times faster than the sample time of G. This input to upsample must be an integer.
G_up has three times as many poles and zeros as G.
Compare the step responses of the original model G with the resampled models G_d2d and G_up.
step(G,'-r',G_d2d,':g',G_up,'--b') legend('G','d2d','upsample','Location','SouthEast')
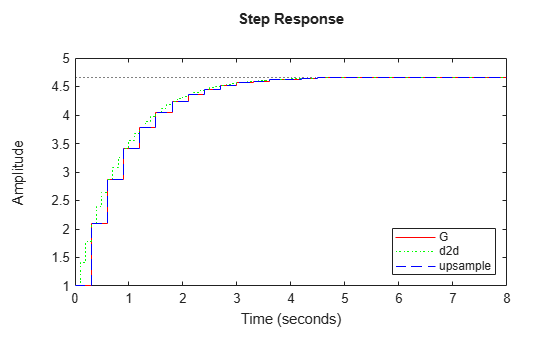
The step response of the upsampled model G_up matches exactly the step response of the original model G. The response of the resampled model G_d2d matches only at every third sample.
Compare the frequency response of the original model with the resampled models.
bode(G,'-r',G_d2d,':g',G_up,'--b') legend('G','d2d','upsample','Location','SouthWest')
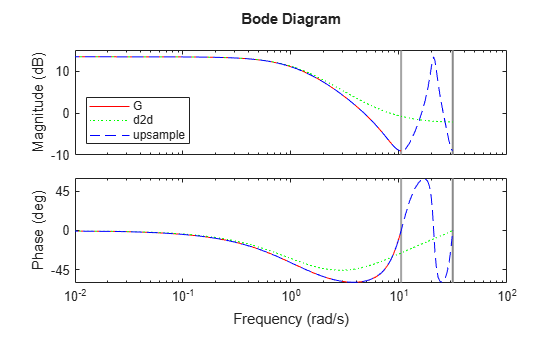
In the frequency domain as well, the model G_up created with the upsample command matches the original model exactly up to the Nyquist frequency of the original model.
Using upsample provides a better match than d2d in both the time and frequency domains. However, upsample increases the model order, which can be undesirable. Additionally, upsample is only available where the original sample time is an integer multiple of the new sample time.
See Also
Functions
d2d|d2dOptions|upsample