RoadRunner Scenario Reader
Libraries:
Automated Driving Toolbox /
RoadRunner Scenario
Description
The RoadRunner Scenario Reader block reads the selected topic from the
RoadRunner scenario. You can set the Topic Category
parameter to Actor, Action,
Sensor, or Event. The block outputs
data as messages.
When you select the Actor topic, the block outputs the data
associated with the actor, such as Actor Specifications and
Actor Pose. When you select the Action
topic, the block outputs data such as Speed Change and
Lane Change. The block returns the simulation states from the previous
time step. You can filter data based on the actor associated with the Simulink® actor model.
When you select the Sensor topic, the block outputs the data
associated with the sensor of specified Sensor ID. You can select the
type of sensor data the block must output by specifying Target
Poses or Lane Boundaries. When you select the
Event topic, the block outputs data for the user-defined event
specified for the Event name parameter.
You can read data from all actors in the scenario, data for only the actor associated with the Simulink model behavior, or data for a specific actor. For more information, see Filter.
Examples
This example shows how you can read traffic signal information from a RoadRunner Scenario simulation in a Simulink actor behavior model. The vehicle associated with the behavior model regulates its speed in response to an approaching traffic signal.
Set Up MATLAB-RoadRunner Scenario Cosimulation Environment
In the MATLAB command prompt, specify the path to your local RoadRunner installation folder. This code snippet uses the default installation path of the RoadRunner application on Windows.
RRInstallationFolder = "C:\Program Files\RoadRunner " + matlabRelease.Release + "\bin\win64";
Update the path for the RoadRunner installation folder by getting the root object within the settings hierarchical tree. Then, use the root object to set the installation path of the RoadRunner application. For more information, see SettingsGroup.
s = settings; s.roadrunner.application.InstallationFolder.PersonalValue = RRInstallationFolder;
Change the project location to the RoadRunner project path on your machine.
rrProjectLocation = "C:\TrafficSignal\New RoadRunner Project";Create the roadrunner object that represents the specified project.
rrApp = roadrunner(rrProjectLocation,InstallationFolder=RRInstallationFolder);
Add the SceneTrafficSignal scene file to the Scenes folder within your RoadRunner project.
copyfile("SceneTrafficSignal.rrscene",fullfile(rrProjectLocation,"Scenes"));
Add the TrafficSignal_SpeedReg scenario file to the Scenarios folder within your RoadRunner project.
copyfile("TrafficSignal_SpeedReg.rrscenario",fullfile(rrProjectLocation,"Scenarios"));
Add the TrafficSignal_Behavior behavior asset file that links the MATLAB System object behavior to the vehicle in the scenario.
copyfile("TrafficSignal_Behavior.rrbehavior.rrmeta",fullfile(rrProjectLocation,"Assets","Behaviors"));
Explore the Scenario
Open the scenario file TrafficSignal_SpeedReg.rrscenario.
openScenario(rrApp,"TrafficSignal_SpeedReg");The scenario contains a white sedan in a lane. The path of the white sedan is laid out using waypoints and passes through the single traffic signal junction in the scene. The junction contains ten traffic signals that are converted to actors using the Traffic Signal Tool (RoadRunner Scenario).
Connect to the RoadRunner Scenario server to enable cosimulation by using the createSimulation function.
sim = createSimulation(rrApp);
Explore the Model
Open the model and load the required reference bus types into the base workspace:
modelname = "TrafficSignal_Stop"; open_system(modelname); load("rrScenarioSimTypes.mat");
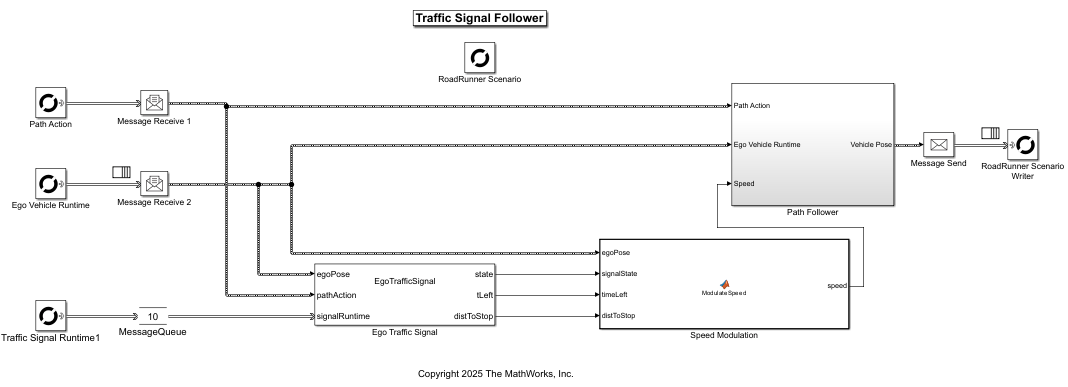
The model programs the movement of the sedan along a predefined path, and reads traffic signal information to detect changes in the signal light.
If the traffic signal is red when the sedan approaches the corresponding junction, it slows down and stops. If the traffic signal turns green for the stopped sedan, then it starts moving and accelerates until it reaches a fixed speed.
The model contains these blocks:
Ego Traffic Signal – MATLAB System Object that uses the
roadrunnerHDMapobject to check if the sedan has reached within a certain distance of the traffic signal junction. Based on this information, the System Object calculates the time left to stop and remaining distance before stopping. It also returns the state of the traffic signal.Speed Modulation – MATLAB function that controls the speed of the sedan. When the traffic signal is red, the MATLAB function calculates the necessary deceleration to slow down and stop the sedan, given that the time taken to stop is less that the time it takes for the signal to change color. When the traffic signal turns green, the function calculates the required acceleration to move the sedan forward.
Path Following – Subsystem that controls the movement of the sedan along a predefined path. The subsystem contains three MATLAB Function blocks: Vehicle Movement finds the current position vectors of the sedan along the X, Y, and Z axes, Actor Pose constructs the 4-by-4 transformation matrix representing the current pose of the sedan, and Actor Velocity constructs the velocity vector based on its yaw angle and speed.
Simulate the Scenario
Play the scenario, TrafficSignal_SpeedReg.
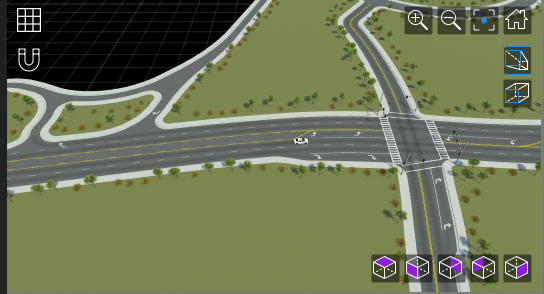
set(sim,SimulationCommand="Start");In the Simulation Tool (RoadRunner Scenario), you can change the Camera View to front to view the changing traffic signals, and the response of the car.
The sedan moves along the path towards the traffic signal junction.

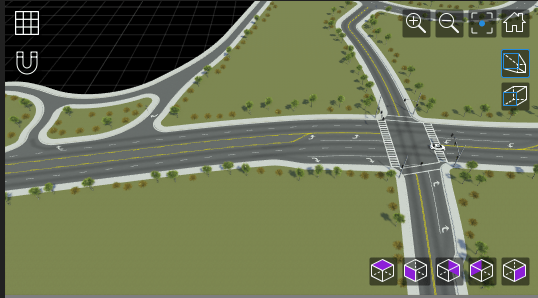
The sedan stops at the junction when the traffic signal turns red. It remains stationary while the signal is red.

When the traffic signal turns green, the sedan starts to accelerate and move along the path again.

Extended Examples

Add Sensors to RoadRunner Scenario Using Simulink
Simulate a RoadRunner Scenario with sensor models defined in Simulink and visualize object and lane detections.
Ports
Input
Output
Parameters
Topic category, specified as one of these values:
Actor— Reads the actor data from the scenarioAction— Reads the action data from the scenarioSensor— Reads the sensor data from the scenarioEvent— Reads the event data from the scenario
Programmatic Use
Block Parameter:
TopicCategory |
| Type: character vector | string |
Values: 'Actor' |
'Action' | 'Sensor' |
'Event'
|
Default: 'Actor' |
Type of actor in scenario, specified as All Types,
Vehicle, Traffic Signal, or Traffic
Signal Controller. The Vehicle type includes additional
wheel information of the actor.
The Traffic Signal type represents traffic signal actors, while
the Traffic Signal Controller type represents a traffic signal
controller entity that connects all traffic signal actors of a junction together.
Dependencies
To enable this parameter, set Topic Category to
Actor.
Programmatic Use
Block Parameter:
ActorCategory |
| Type: character vector | string |
Values: 'All Types' |
'Vehicle' | 'Traffic Signal' |
'Traffic Signal Controller'
|
Default: 'All
Types' |
Type of action that can be read from the scenario, specified as one of these values:
| Field Name | Description |
|---|---|
Change Parameter | Reads the user-created parameter from the scenario. For more information, see Change Parameter. |
Lateral Offset | Reads the lateral offset action data from the scenario. For more information, see Lateral Offset. |
Path Following | Reads the path following action data from the scenario. For more information, see Path Following. |
Speed Change | Reads the speed change action data from the scenario. For more information, see Speed Change. |
Lane Change | Reads the lane change action data from the scenario. For more information, see Lane Change. |
Longitudinal Distance | Reads the longitudinal distance action data from the scenario. For more information, see Longitudinal Distance. |
User Defined | Reads the custom parameters of a user-defined action from the scenario. For more information, see User Defined. |
Dependencies
To enable this parameter, set Topic Category to
Action.
Programmatic Use
Block Parameter:
ActionType |
| Type: character vector | string |
Values: 'Change Parameter'
| 'Lane Change' | 'Lateral Offset' |
'Longitudinal Distance' | 'Path Following' |
'Speed Change' | 'User-Defined' |
Default: 'Path
Following' |
Name of user-defined action to read from the scenario.
Dependencies
To enable this parameter, set Topic Category to
Action and Action Type to
User-Defined.
Programmatic Use
Block Parameter:
UserDefinedAction |
| Type: character vector | string |
Values: 'Action1' |
'Action2' | action name |
Default:
'Action1' |
Data Types: string | character vector
Sensor data derived from the scenario ground truth, specified as one of these options:
Target Poses— The block outputs poses of targets within sensor range in host vehicle coordinates. For the bus structure of the output target poses, see the output argument description of thetargetPosesfunction.Target Poses For Host— The block outputs poses of all targets in the in host vehicle coordinates. For the bus structure of the output target poses, see the output argument description of thetargetPosesfunction.Lane Boundaries— The block outputs lane boundaries within sensor range in host vehicle coordinates. For the bus structure of the output lane boundaries, see the output argument description of thelaneBoundariesfunction.Target Poses And Lane Boundaries— The block outputs both lane boundaries and poses of targets within the sensor range in host vehicle coordinates.
The origin of the host vehicle coordinates is the geometric center of the host vehicle.
You can send the above outputs directly to sensor detection generator blocks and obtain detections.
Dependencies
To enable this parameter, set Topic Category to
Sensor.
Programmatic Use
Block Parameter:
SensorTopic |
| Type: character vector | string |
Values: 'Target Poses' |
'Target Poses For Host' | 'Lane Boundaries'
| 'Target Poses And Lane Boundaries' |
Default: 'Target
Poses' |
Type of event to read from a scenario.
The event being read must be mapped to the corresponding bus object in the RoadRunner Scenario block.
Dependencies
To enable this parameter, set Topic Category to
Event.
Programmatic Use
Block Parameter:
EventType |
| Type: character vector | string |
Values:
'User-Defined' |
Default:
'User-Defined' |
Actor data, or lane boundary captured through sensor views.
The Topic parameter can hold various sets of options, as specified in the tables below, depending on the configuration of other fields.
The Topic parameter holds the options described in the table below if both these field configurations are true:
Topic Category is set to
Actor.Actor Type is set to
All Types.
| Option | Description |
|---|---|
Actor Specifications (default) | Static attributes associated with the actor, such as actor ID, actor name, and bounding box. For more information, see Actor Specifications. |
Actor Pose | Dynamic data associated with the actor, such as pose, velocity, and angular velocity. For vehicle assets included with or created in RoadRunner, the actor origin is the geometric center of the actor. For more information, see Actor Pose. |
Actor Pose (Driving Scenario
compatible) | Dynamic data associated with the actor, such as actor ID, position, velocity, roll, pitch, yaw, and angular velocity. For vehicle assets included with or created in RoadRunner, the actor origin is the point on the ground below the center of its rear axle. For more information, see Actor Pose (Driving Scenario compatible). |
Actor Lane Location | Dynamic data associated with the lane location of actors. For more information, see Actor Lane Location. |
If Topic Category is set to Actor,
and Actor Type is set to All Types, set
the Topic field programmatically by using the
TopicType block
parameter.
set_param(gcb,"TopicType","Actor Lane Location");
The Topic parameter holds the options described in the table below if both these field configurations are true:
Topic Category is set to
Actor.Actor Type is set to
Vehicle.
| Option | Description |
|---|---|
Vehicle Specifications (default) | Static attributes associated with the vehicle, such as paint color, and wheel specifications. For more information, see Vehicle Specifications. |
Vehicle Pose | Dynamic data associated with the actor, such as wheel poses. For more information, see Vehicle Pose. |
If Topic Category is set to Actor,
and Actor Type is set to Vehicle, set
the Topic field programmatically by using the
VehicleType block
parameter.
set_param(gcb,"VehicleType","Vehicle Pose");
The Topic parameter holds the options described in the table below if both these field configurations are true:
Topic Category is set to
Actor.Actor Type is set to
Traffic Signal.
| Option | Description |
|---|---|
Traffic Signal Specifications
(default) | Static specifications of a traffic signal actor. For more information, see Traffic Signal Specifications Topic. |
Traffic Signal Runtime | Run-time information of a traffic signal actor. For more information, see Traffic Signal Runtime Topic. |
If Topic Category is set to Actor,
and Actor Type is set to Traffic Signal,
set the Topic field programmatically by using the
TrafficSignalType block
parameter.
set_param(gcb,"TrafficSignalType","Traffic Signal Runtime");
The Topic parameter holds the options described in the table below if both these field configurations are true:
Topic Category is set to
Actor.Actor Type is set to
Traffic Signal Controller.
| Option | Description |
|---|---|
Traffic Signal Controller Specifications
(default) | Static specifications of a traffic signal controller. For more information, see Traffic Signal Controller Specifications Topic. |
Traffic Signal Controller Runtime | Run-time information of a traffic signal controller. For more information, see Traffic Signal Controller Runtime Topic. |
If Topic Category is set to Actor,
and Actor Type is set to Traffic Signal
Controller, set the Topic field programmatically by
using the TrafficSignalControllerType block
parameter.
set_param(gcb,"TrafficSignalControllerType",... "Traffic Signal Controller Runtime");
The Topic parameter holds the options described in the table below if both these field configurations are true:
Topic Category is set to
Sensor.Sensor View is set to
Lane Boundaries.
| Option | Description |
|---|---|
Ego-Lane (default) | Boundaries of the lane in which the host vehicle actor is traveling |
Ego and Adjacent Lanes | Boundaries of the adjacent left and right lanes, as well as the lane in which host vehicle actor is traveling |
All Lanes | Boundaries of all lanes on the road |
If Topic Category is set to Sensor,
and Sensor View is set to Lane
Boundaries or Target Poses and Lane
Boundaries, set the Topic field programmatically by
using the LaneBoundaryOutputTopic block
parameter.
set_param(gcb,"LaneBoundaryOutputTopic","All Lanes");
Programmatic Use
Block Parameter: TopicType
(If Topic Category is Actor and
Actor Type is All Types) |
| Type: character vector | string |
Values: 'Actor
Specifications' | 'Actor Pose' | 'Actor Pose
(Driving Scenario compatible)' | 'Actor Lane
Location' |
Block Parameter:
VehicleType (If Topic Category is
Actor and Actor Type is
Vehicle) |
| Type: character vector | string |
Values: 'Vehicle
Specifications' | 'Vehicle Pose' |
Block Parameter:
TrafficSignalType (If Topic Category is
Actor and Actor Type is
Traffic Signal) |
| Type: character vector | string |
Values: 'Traffic Signal
Specifications' | 'Traffic Signal Runtime' |
Block Parameter:
TrafficSignalControllerType (If Topic
Category is Actor and Actor
Type is Traffic Signal Controller) |
| Type: character vector | string |
Values: 'Traffic Signal Controller
Specifications' | 'Traffic Signal Controller
Runtime' |
Block Parameter:
LaneBoundaryOutputTopic (If Topic Category
is Sensor and Sensor View is
Lane Boundaries or Target Poses And Lane
Boundaries) |
| Type: character vector | string |
Values: 'Ego-Lane' |
'Ego and Adjacent Lanes' | 'All
Lanes' |
Filter criteria for relevant topic data, specified as one of these options:
| Option | Description |
|---|---|
None | Output data for all actors in the scenario. When you
set Filter to
For an example on how you can use a Queue block and a MATLAB System block to handle multiple messages per time step, see Traffic Signal Follower with RoadRunner Scenario. |
Self | Output data for the actor associated with the Simulink model behavior. For an example on using a RoadRunner
Scenario Reader block with the |
Actor ID (provided by input) | Output data for a specific actor. Selecting this option exposes input port Port_1 through which you can provide an actor ID. For example, you can connect the Constant block to Port_1 to provide a fixed value that represents the ID of an actor in a scenario. |

Dependencies
To enable this parameter, set Topic Category to
Actor or Action.
Programmatic Use
Block Parameter:
Filter |
| Type: character vector | string |
Values: 'None' |
'Self' | 'Actor ID (provided by
input)' |
Default: 'Self' |
Relationship to the filtered entity, specified as one of these options:
None— No selection. The RoadRunner Scenario reader block outputs data associated with the entity filtered according to the Filter parameter.Parent— Parent actor of filtered entity. The RoadRunner Scenario reader block outputs data associated with the parent of the entity filtered according to the Filter parameter.Children— Children actors of filtered entity. The RoadRunner Scenario reader block outputs data associated with the children of the entity filtered according to the Filter parameter.
For example, select Actor ID (provided by input) as the
filter to expose input port Port_1. Attach a Constant block
that outputs a value of uint64(2) to the input port. If you select
Parent from the Additional
Relationship field, then the RoadRunner Scenario Reader
block outputs data associated with the parent of the actor with ID
2.
Note
You can also use the Additional Relationship parameter to output information about actions of parent or child actors.
Dependencies
To enable this parameter, set Filter to Actor ID
(provided by input) or Self.
Programmatic Use
Block Parameter:
AdditionalRelationship |
| Type: character vector | string |
Values: 'None' |
'Parent' | 'Children' |
Default: 'None' |
Unique index of the sensor, specified as a positive integer. The Sensor
ID must correspond to the Unique identifier of
sensor parameter of the corresponding sensor model detection generator
block.
Dependencies
To enable this parameter, set Topic Category to
Sensor and Sensor View to either
Target Poses, Lane Boundaries
or Target Poses And Lane Boundaries.
Programmatic Use
Block Parameter:
SensorID |
| Type: character vector | string |
Values: '1' |
'2' | positive integer |
Default: '1' |
Block sample time, in seconds. Specified as a positive scalar.
Programmatic Use
Block Parameter:
SampleTime |
| Type: character vector | string |
Values: '0' | positive
scalar |
Default: '0' |
Name of the user-defined event to read from a scenario.
Dependencies
To enable this parameter, set Topic Category to
Event and Event Type to
User-Defined.
Programmatic Use
Block Parameter:
UserDefinedEvent |
| Type: character vector | string |
Values: 'Event1' |
'Event2' | event name |
Default: 'Event1' |
Data Types: string | character vector
More About
Version History
Introduced in R2022aSee Also
RoadRunner Scenario | RoadRunner Scenario Writer | Receive (Simulink)