firtype
Determine type (1-4) of linear phase FIR filter System object
Syntax
Description
Examples
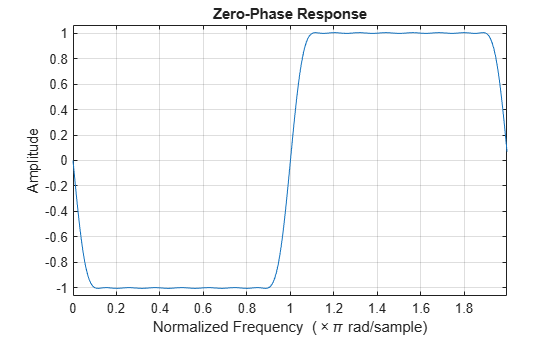
Design a Hilbert transformer of order 30 with a transition width of 0.2π rad/sample. Use least-squares minimization to obtain an equiripple linear-phase FIR filter. Plot the zero-phase response in the interval [–π,π).
d = fdesign.hilbert('N,TW',30,0.2); Hd = design(d,'equiripple',SystemObject=true); zerophase(Hd,'whole')
The impulse response of this even-order type-3 filter is antisymmetric.
impz(Hd)
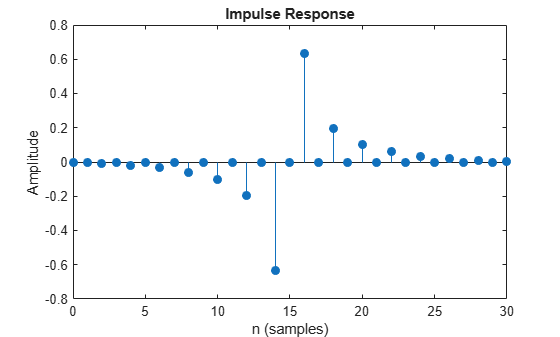
ftype = firtype(Hd)
ftype = 3
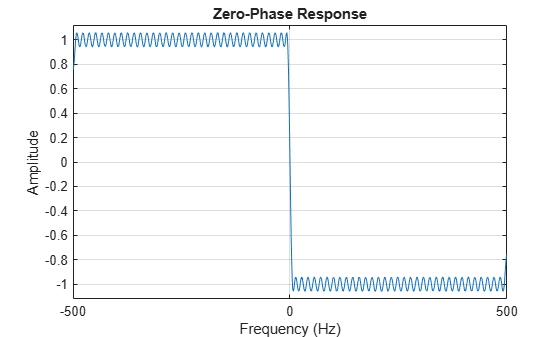
Design a minimum-order Hilbert transformer that has a sample rate of 1 kHz. Specify the width of the transition region as 10 Hz and the passband ripple as 1 dB. Display the zero-phase response of the filter.
fs = 1e3; d = fdesign.hilbert('TW,Ap',10,1,fs); hd = design(d,'equiripple',SystemObject=true); zerophase(hd,-fs/2:0.1:fs/2,fs)
Input Arguments
Output Arguments
Version History
Introduced in R2013aSee Also
firtype | islinphase | isreal