dsp.FourthOrderSectionFilter
Implement cascade of fourth-order section filter
Description
The dsp.FourthOrderSectionFilter implements a cascade of
fourth-order section filters.
Creation
Syntax
Description
fos = dsp.FourthOrderSectionFilterFourthOrderSectionFilter object, fos, that
implements a cascade of fourth order filter sections.
fos = dsp.FourthOrderSectionFilter(num,den)FourthOrderSectionFilter object with the
Numerator property set to num and the
Denominator property set to den.
fos = dsp.FourthOrderSectionFilter(___,SampleRate=Value)"normalized". (since R2026a)
To specify an input sample rate of 22050 Hz, set
SampleRate to 22050. To specify the input sample rate in normalized
units, set SampleRate to "normalized". (since R2026a)
fos = dsp.FourthOrderSectionFilter(___,PropertyName,Value)FourthOrderSectionFilter object with each specified property
name set to the specified value. You can specify additional name-value pair arguments in
any order.
Example: fos =
dsp.FourthOrderSectionFilter('Numerator',num,'Denominator',den)
Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
Examples
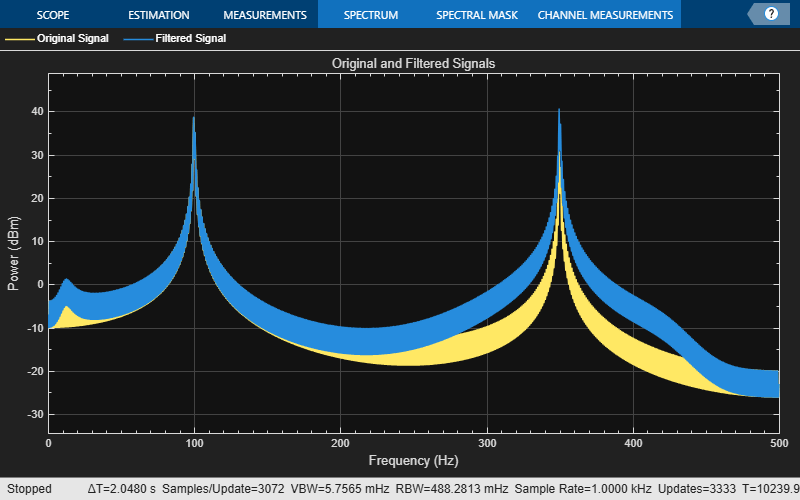
Filter a noisy sinusoidal signal using the dsp.FourthOrderSectionFilter object. Visualize the original and filtered signals using a spectrum analyzer.
Input Signal
The input signal is the sum of two sine waves with frequencies 100 Hz and 350 Hz. Add zero-mean white Gaussian noise with a standard deviation of 1e-4 to the sum of sine waves. The sample rate is 1000 Hz.
frameSize = 1024;
fs = 1000;
Sine1 = dsp.SineWave(5,100,SamplesPerFrame=1024,SampleRate=fs);
Sine2 = dsp.SineWave(2,350,pi/2,SamplesPerFrame=1024,...
SampleRate=fs);
x = Sine1()+Sine2()+1e-4.*randn(Sine1.SamplesPerFrame,1);Fourth-Order Section (FOS) Filter Coefficients
The numerator and denominator coefficients for the FOS filter are obtained using designParamEq which is part of Audio Toolbox:
%N = [2,4]; %gain = [5,10]; %centerFreq = [0.025,0.75]; %bandwidth = [0.025,0.35]; %mode = 'fos'; %[num,den] = designParamEQ(FilterOrder=N,Gain=gain,... % CenterFrequency=centerFreq,Bandwidth=bandwidth,CascadeSectionsForm=mode,... % Orientation="row"); num = [1.0223 -1.9368 0.9205 0 0 1.5171 2.3980 1.4317 0.6416 0.2752]; den = [1.0000 -1.9368 0.9428 0 0 1.0000 2.0136 1.9224 1.0260 0.3016];
Initialize Filter and Spectrum Analyzer
Construct the FOS IIR filter using the num and den coefficients. Construct a spectrum analyzer to visualize the original sinusoidal signal and the filtered signal.
fos = dsp.FourthOrderSectionFilter(Numerator=num,... Denominator=den); scope = spectrumAnalyzer(... SampleRate=fs,... PlotAsTwoSidedSpectrum=false,... FrequencyScale="linear",... Method="welch",... Title="Original and Filtered Signals",... ShowLegend=true,... ChannelNames={"Original Signal","Filtered Signal"});
Filter the input signal, and visualize the original and filtered spectrums.
for i = 1:10000 y = fos(x); scope([x,y]); end release(scope);
Design a lowpass fourth-order section (FOS) filter using the fdesign function. Using this filter, filter a noisy sinusoidal signal with two tones, one at 3 kHz, and the other at 12 kHz.
Design a fifth-order filter using the elliptic method in the 'df2tsos' structure. Use L-infinity norm scaling in the frequency domain. Specify the passband frequency to be 0.15 rad/sample and the stopband frequency to be 0.25 rad/sample. Specify 1 dB of allowable passband ripple and a stopband attenuation of 60 dB.
Fp = 0.15; Fst = 0.25; Ap = 1; Ast = 60;
The filter coefficients are scaled using an fdopts.sosscaling object. The scaling object is defined to have no numerator constraints, and the ScaleValueConstraint is set to 'unit', specifying the scaling to be unity scaling.
fdo = fdopts.sosscaling; fdo.NumeratorConstraint='none'; fdo.ScaleValueConstraint='unit'; f = fdesign.lowpass('Fp,Fst,Ap,Ast',Fp,Fst,Ap,Ast); hFilter = design(f,'ellip','SystemObject',true,... 'FilterStructure','df2tsos','SOSScaleNorm','Linf',... 'SOSScaleOpts',fdo)
hFilter =
dsp.SOSFilter with properties:
Structure: 'Direct form II transposed'
CoefficientSource: 'Property'
Numerator: [3×3 double]
Denominator: [3×3 double]
HasScaleValues: true
ScaleValues: [1 1 1 1.0000]
Show all properties
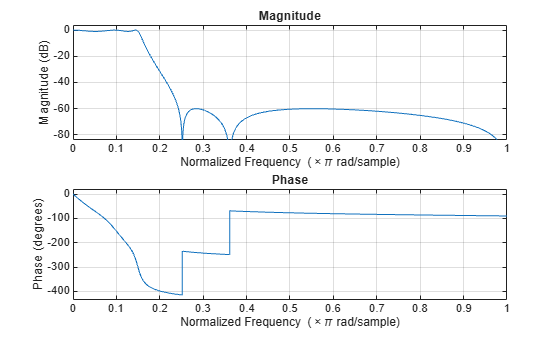
Visualize the lowpass frequency response of the designed filter.
freqz(hFilter)
Convert the lowpass filter to a bandpass filter using the iirlp2bp function.
[num,den] = iirlp2bp(hFilter.Numerator,hFilter.Denominator,Fp,[0.25,0.75])
num = 3×5
0.2456 0 -0.2456 0 0
0.4175 -0.0000 -0.4206 -0.0000 0.4175
0.4281 -0.0000 -0.6433 -0.0000 0.4281
den = 3×5
1.0000 -0.0000 0.5088 0 0
1.0000 -0.0000 0.0060 -0.0000 0.8657
1.0000 -0.0000 0.5160 -0.0000 0.5283
Create a fourth-order section filter using these numerator and denominator coefficients.
fos = dsp.FourthOrderSectionFilter(num,den)
fos =
FourthOrderSectionFilter with properties:
Numerator: [3×5 double]
Denominator: [3×5 double]
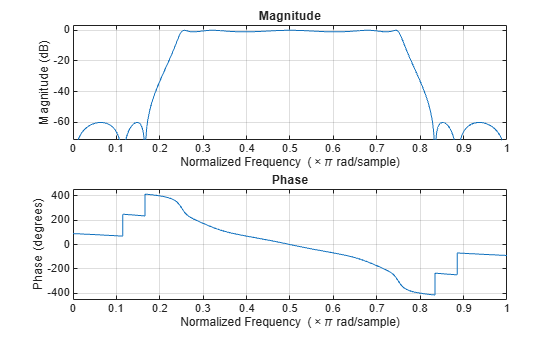
Visualize the frequency response of the fourth-order section filter.
freqz(fos);
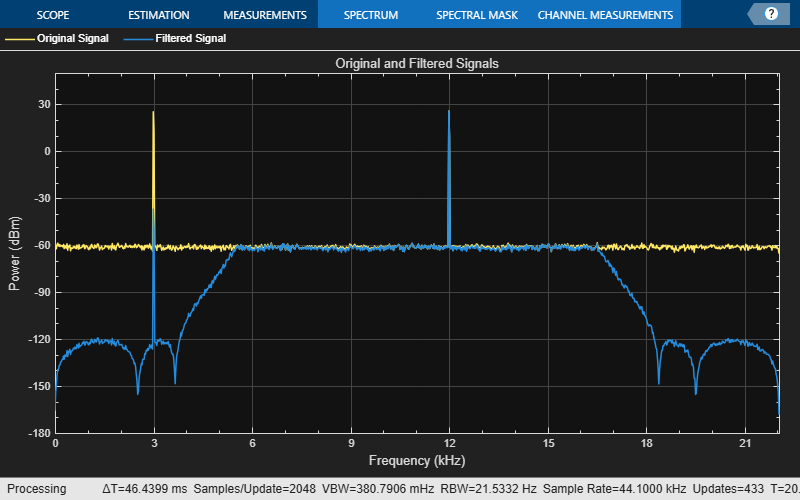
Filter a noisy input signal with the fourth-order section filter. Visualize the spectra of the original signal and the filtered signal using the spectrum analyzer.
The input is a sum of two sine waves with frequencies 3 kHz and 12 kHz, respectively. The input sample rate is 44.1 kHz, and the frame size is set to 1024 samples.
fs = 44100; FrameLength = 1024; SINE1 = dsp.SineWave('SamplesPerFrame',FrameLength,'SampleRate',fs,'Frequency',3000); SINE2 = dsp.SineWave('SamplesPerFrame',FrameLength,'SampleRate',fs,'Frequency',12000);
Initialize a spectrum analyzer to visualize the signal spectra.
scope = spectrumAnalyzer(... 'SampleRate',fs,... 'PlotAsTwoSidedSpectrum',false,... 'Title','Original and Filtered Signals',... 'ShowLegend',true,... 'YLimits',[-180 50],... 'ChannelNames',{'Original Signal','Filtered Signal'}); for index = 1:1000 x = SINE1() + SINE2()+ 0.001*randn(FrameLength,1); y = fos(x); scope([x,y]); end
Since R2026a
Specify the input sample rate explicitly while constructing the dsp.FourthOrderSectionFilter object using the SampleRate argument.
fosFilt = dsp.FourthOrderSectionFilter(SampleRate=22050)
fosFilt =
FourthOrderSectionFilter with properties:
Numerator: [1 0.1000 0.2000 0.3000 0.4000]
Denominator: [1 0.1000 0.2000 0.3000 0.4000]
You can view this information using the Input sample rate field of the info function.
info(fosFilt)
ans = 7×31 char array
'Discrete-Time IIR Filter (real)'
'-------------------------------'
'Filter Structure : Cascade '
'Number of Stages : 1 '
'Stable : Yes '
'Linear Phase : No '
'Input sample rate : 22050 '
To specify the input sample rate after constructing the object, use the setInputSampleRate function.
setInputSampleRate(fosFilt,44100)
To confirm, view the sample rate information using the info function.
info(fosFilt)
ans = 7×31 char array
'Discrete-Time IIR Filter (real)'
'-------------------------------'
'Filter Structure : Cascade '
'Number of Stages : 1 '
'Stable : Yes '
'Linear Phase : No '
'Input sample rate : 44100 '