poseplot
Syntax
Description
The poseplot function plots a specified 3-D pose (position
and orientation) as a patch with an xyz-frame at the patch
origin.
poseplot plots the pose at the coordinate origin position with zero
rotation. The default navigation frame is the north-east-down (NED) frame.
poseplot( plots the pose with the
specified orientation. The position by default is orientation)[0 0 0].
poseplot(___, specifies the
navigation frame of the pose plot. frame)
poseplot(___, specifies
pose patch properties using one or more name-value arguments. For example,
Name=Value)poseplot(PatchFaceColor="r") plots the pose with red face color. For a
list of properties, see PosePatch Properties.
poseplot( specifies the
parent axes of the pose plot.ax,___)
p = poseplot(___)PosePatch object. Use p to modify properties of the
pose patch after creation. For a list of properties, see PosePatch Properties.
Examples
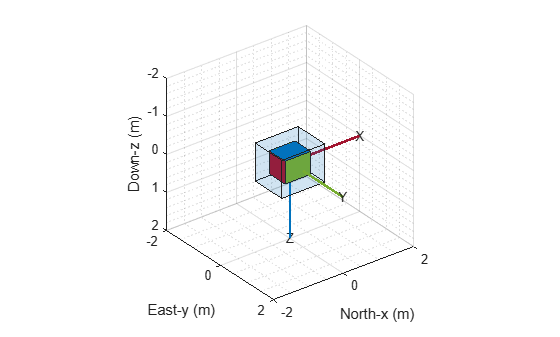
Plot the default pose using the poseplot function with default settings.
poseplot xlabel("North-x (m)") ylabel("East-y (m)") zlabel("Down-z (m)");
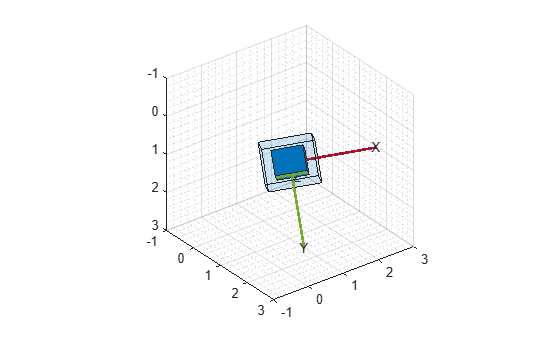
Next, plot a pose with specified orientation and position.
q = quaternion([35 10 50],"eulerd","ZYX","frame"); position = [1 1 1]; poseplot(q,position)
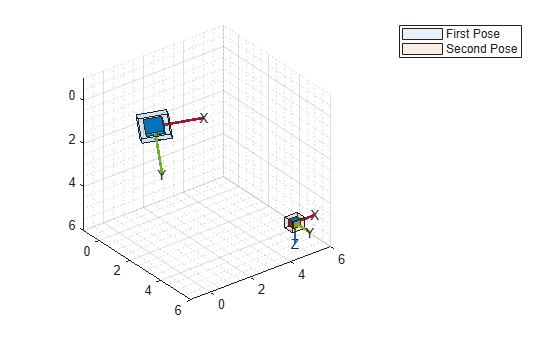
Then, plot a second pose on the figure and return the PosePatch object. Plot the second pose with a smaller size by using the ScaleFactor name-value argument.
hold on
p = poseplot(eye(3),[5 5 5],ScaleFactor=0.5)p =
PosePatch with properties:
Orientation: [3×3 double]
Position: [5 5 5]
Show all properties
legend("First Pose","Second Pose") hold off
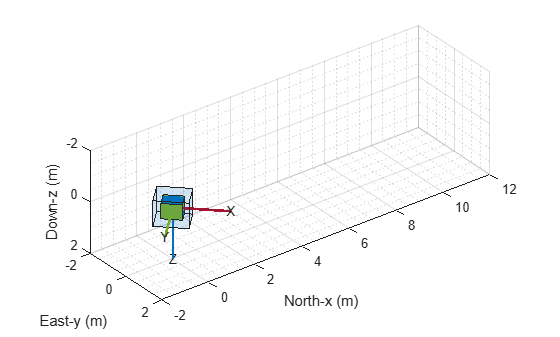
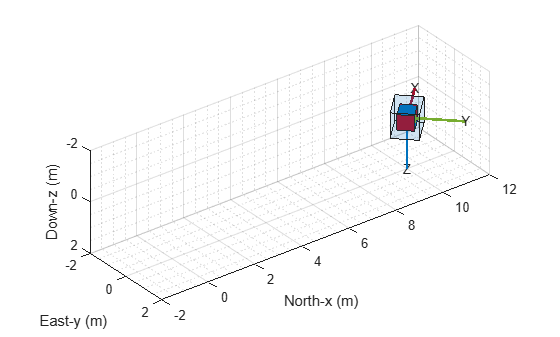
Animate a series of poses using the poseplot function. First, define the initial and final positions.
ps = [0 0 0]; pf = [10 0 0];
Then, define the initial and final orientations using the quaternion object.
qs = quaternion([45,0,0],'eulerd','ZYX','frame'); qf = quaternion([-45,0,0],'eulerd','ZYX','frame');
Show the starting pose.
patch = poseplot(qs,ps); ylim([-2 2]) xlim([-2 12]) xlabel("North-x (m)") ylabel("East-y (m)") zlabel("Down-z (m)");
Change the position and orientation continuously using coefficients, and update the pose using the set object function.
for coeff = 0:0.01:1 q = slerp(qs,qf,coeff); position = ps + (pf - ps)*coeff; set(patch,Orientation=q,Position=position); drawnow end
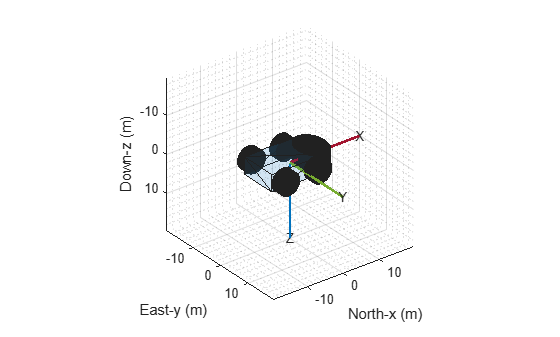
Plot orientations and positions in meshes using the poseplot function. First, plot a ground vehicle at the origin with zero rotation.
poseplot(ones("quaternion"),[0 0 0],MeshFileName="groundvehicle.stl",ScaleFactor=0.3); xlabel("North-x (m)") ylabel("East-y (m)") zlabel("Down-z (m)")
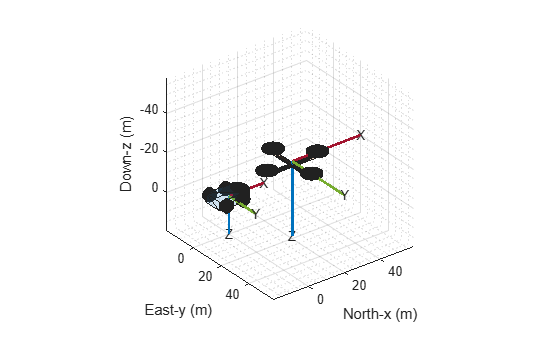
Second, plot a rotor at the position [20 20 -20] with zero rotation.
hold on poseplot(ones("quaternion"),[20 20 -20],MeshFileName="multirotor.stl",ScaleFactor=0.2);
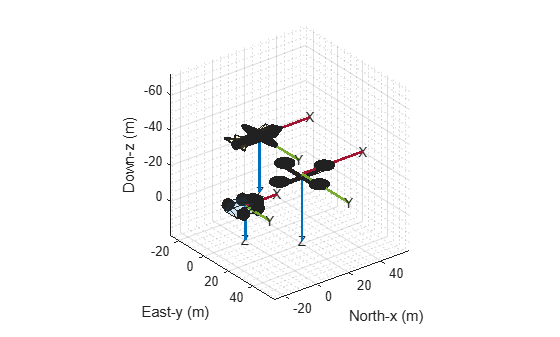
Lastly, plot a fixed-wing aircraft at the position [5 5 -40] with zero rotation.
poseplot(ones("quaternion"),[5 5 -40],MeshFileName="fixedwing.stl",ScaleFactor=0.4); view([-37.8 28.4]) hold off
Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Example: poseplot(PatchFaceAlpha=0.1)
The PosePatch properties listed here are only a subset. For a
complete list, see PosePatch Properties.
Orientation of the pose plot, specified as a quaternion
object or a rotation matrix.
Position of the pose plot, specified as a three-element real-valued vector.
Name of Standard Triangle Language (STL) mesh file, specified as a string scalar or a
character vector containing the name of the mesh file. When you
specify this argument, the poseplot
function plots the mesh instead of the orientation box.
Scale factor of the pose plot, specified as a nonnegative scalar. The scale factor
controls the size of the orientation box. When you specify the
MeshFileName argument, the scale factor also changes the scale
of the mesh.
Patch face color, specified as an RGB triplet, a hexadecimal color code, a color name, or a short name.
An RGB triplet is a three-element row vector whose elements specify the intensities of the red, green, and blue components of the color. The intensities must be in the range
[0, 1]; for example,[0.4 0.6 0.7].A hexadecimal color code is a character vector or a string scalar that starts with a hash symbol (
#) followed by three or six hexadecimal digits, which can range from0toF. The values are not case sensitive. Thus, the color codes"#FF8800","#ff8800","#F80", and"#f80"are equivalent.
Here is a list of commonly used colors and their corresponding values.
| Color Name | Short Name | RGB Triplet | Hexadecimal Color Code | Appearance |
|---|---|---|---|---|
"red" | "r" | [1 0 0] | "#FF0000" |
|
"green" | "g" | [0 1 0] | "#00FF00" |
|
"blue" | "b" | [0 0 1] | "#0000FF" |
|
"cyan"
| "c" | [0 1 1] | "#00FFFF" |
|
"magenta" | "m" | [1 0 1] | "#FF00FF" |
|
"yellow" | "y" | [1 1 0] | "#FFFF00" |
|
"black" | "k" | [0 0 0] | "#000000" |
|
"white" | "w" | [1 1 1] | "#FFFFFF" |
|
Patch face transparency, specified as a scalar in range [0, 1]. A value of
1 is fully opaque and 0 is completely
transparent.
Output Arguments
Version History
Introduced in R2021b