paretosearch
Find points in Pareto set
Syntax
Description
x = paretosearch(fun,nvars,A,b,Aeq,beq,lb,ub)x, so that x is always in the range
lb ≤ x ≤ ub.
If no linear equalities exist, set Aeq = [] and beq =
[]. If x(i) has no lower bound, set lb(i)
= -Inf. If x(i) has no upper bound, set
ub(i) = Inf.
x = paretosearch(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon)ineqnonlin(x) defined in
nonlcon. The paretosearch function finds
nondominated points such that ineqnonlin(x) ≤ 0. If no
bounds exist, set lb = [], ub = [], or
both.
Note
Currently, paretosearch does not support nonlinear equality
constraints eqnonlin(x) = 0.
Examples
Find points on the Pareto front of a two-objective function of a two-dimensional variable.
fun = @(x)[norm(x-[1,2])^2;norm(x+[2,1])^2]; rng default % For reproducibility x = paretosearch(fun,2);
Pareto set found that satisfies the constraints. Optimization completed because the relative change in the volume of the Pareto set is less than 'options.ParetoSetChangeTolerance' and constraints are satisfied to within 'options.ConstraintTolerance'.
Plot the solution as a scatter plot.
plot(x(:,1),x(:,2),"*") xlabel("x(1)") ylabel("x(2)")
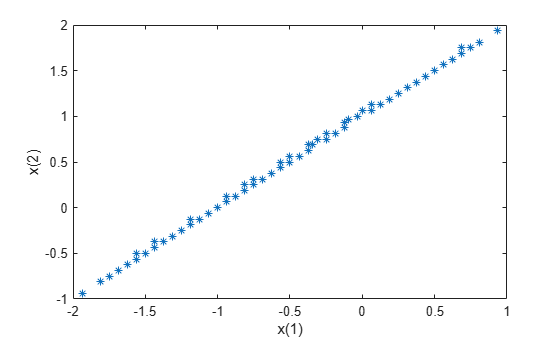
Theoretically, the solution of this problem is a straight line from [-2,-1] to [1,2]. paretosearch returns evenly-spaced points close to this line.
Create a Pareto front for a two-objective problem in two dimensions subject to the linear constraint x(1) + x(2) <= 1.
fun = @(x)[norm(x-[1,2])^2;norm(x+[2,1])^2]; A = [1,1]; b = 1; rng default % For reproducibility x = paretosearch(fun,2,A,b);
Pareto set found that satisfies the constraints. Optimization completed because the relative change in the volume of the Pareto set is less than 'options.ParetoSetChangeTolerance' and constraints are satisfied to within 'options.ConstraintTolerance'.
Plot the solution as a scatter plot.
plot(x(:,1),x(:,2),"*") xlabel("x(1)") ylabel("x(2)")
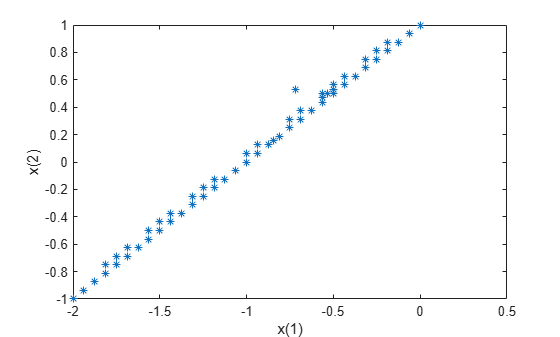
Theoretically, the solution of this problem is a straight line from [-2,-1] to [0,1]. paretosearch returns evenly-spaced points close to this line.
Create a Pareto front for a two-objective problem in two dimensions subject to the bounds x(1) >= 0 and x(2) <= 1.
fun = @(x)[norm(x-[1,2])^2;norm(x+[2,1])^2]; lb = [0,-Inf]; % x(1) >= 0 ub = [Inf,1]; % x(2) <= 1 rng default % For reproducibility x = paretosearch(fun,2,[],[],[],[],lb,ub);
Pareto set found that satisfies the constraints. Optimization completed because the relative change in the volume of the Pareto set is less than 'options.ParetoSetChangeTolerance' and constraints are satisfied to within 'options.ConstraintTolerance'.
Plot the solution as a scatter plot.
plot(x(:,1),x(:,2),"*") xlabel("x(1)") ylabel("x(2)")
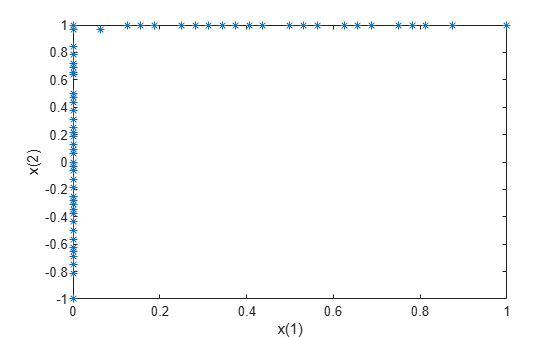
All of the solution points are on the constraint boundaries x(1) = 0 or x(2) = 1.
Create a Pareto front for a two-objective problem in two dimensions subject to bounds -1.1 <= x(i) <= 1.1 and the nonlinear constraint norm(x)^2 <= 1.2. The nonlinear constraint function appears at the end of this example, and works if you run this example as a live script. To run this example otherwise, include the nonlinear constraint function as a file on your MATLAB® path.
To better see the effect of the nonlinear constraint, set options to use a large Pareto set size.
rng default % For reproducibility fun = @(x)[norm(x-[1,2])^2;norm(x+[2,1])^2]; lb = [-1.1,-1.1]; ub = [1.1,1.1]; options = optimoptions("paretosearch",ParetoSetSize=200); x = paretosearch(fun,2,[],[],[],[],lb,ub,@circlecons,options);
Pareto set found that satisfies the constraints. Optimization completed because the relative change in the volume of the Pareto set is less than 'options.ParetoSetChangeTolerance' and constraints are satisfied to within 'options.ConstraintTolerance'.
Plot the solution as a scatter plot. Include a plot of the circular constraint boundary.
figure plot(x(:,1),x(:,2),"*") xlabel("x(1)") ylabel("x(2)") hold on rectangle(Position=[-1.2 -1.2 2.4 2.4],Curvature=1) xlim([-1.2,0.5]) ylim([-0.5,1.2]) axis square hold off
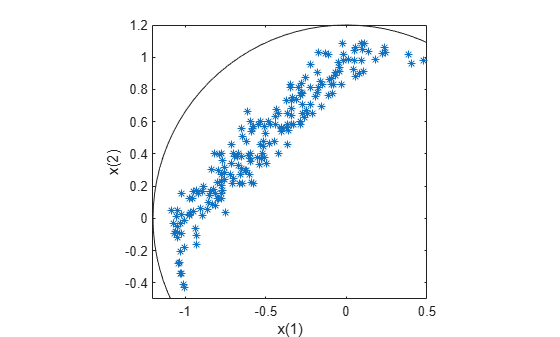
The solution points that have positive x(1) values or negative x(2) values are close to the nonlinear constraint boundary.
function [ineqnonlin,eqnonlin] = circlecons(x) eqnonlin = []; ineqnonlin = norm(x)^2 - 1.2; end
Copyright 2024-2026, The MathWorks, Inc.
To monitor the progress of paretosearch, specify the 'psplotparetof' plot function.
fun = @(x)[norm(x-[1,2])^2;norm(x+[2,1])^2]; options = optimoptions("paretosearch",PlotFcn="psplotparetof"); lb = [-4,-4]; ub = -lb; x = paretosearch(fun,2,[],[],[],[],lb,ub,[],options);
Pareto set found that satisfies the constraints. Optimization completed because the relative change in the volume of the Pareto set is less than 'options.ParetoSetChangeTolerance' and constraints are satisfied to within 'options.ConstraintTolerance'.
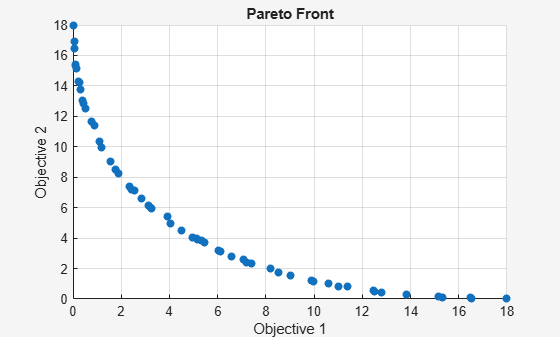
The solution looks like a quarter-circular arc with radius 18, which can be shown to be the analytical solution.
Obtain the Pareto front in both function space and parameter space by calling paretosearch with both the x and fval outputs. Set options to plot the Pareto set in both function space and parameter space.
fun = @(x)[norm(x-[1,2])^2;norm(x+[2,1])^2]; lb = [-4,-4]; ub = -lb; options = optimoptions("paretosearch",PlotFcn=["psplotparetof" "psplotparetox"]); rng default % For reproducibility [x,fval] = paretosearch(fun,2,[],[],[],[],lb,ub,[],options);
Pareto set found that satisfies the constraints. Optimization completed because the relative change in the volume of the Pareto set is less than 'options.ParetoSetChangeTolerance' and constraints are satisfied to within 'options.ConstraintTolerance'.
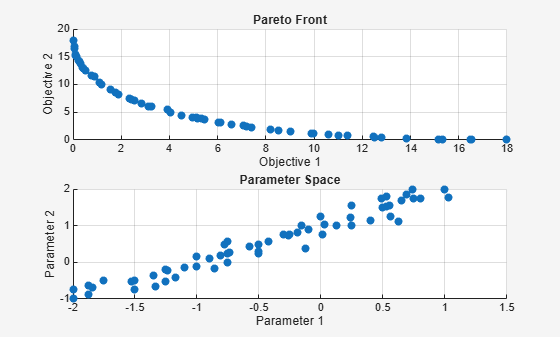
The analytical solution in objective function space is a quarter-circular arc of radius 18. In parameter space, the analytical solution is a straight line from [-2,-1] to [1,2]. The solution points are close to the analytical curves.
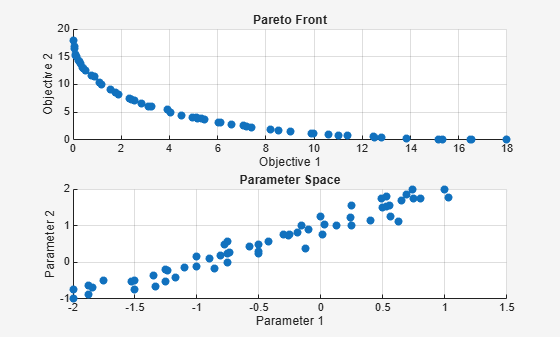
Set options to monitor the Pareto set solution process. Also, obtain more outputs from paretosearch to enable you to understand the solution process.
options = optimoptions("paretosearch",Display="iter",... PlotFcn=["psplotparetof" "psplotparetox"]); fun = @(x)[norm(x-[1,2])^2;norm(x+[2,1])^2]; lb = [-4,-4]; ub = -lb; rng default % For reproducibility [x,fval,exitflag,output] = paretosearch(fun,2,[],[],[],[],lb,ub,[],options);
Iter F-count NumSolutions Spread Volume 0 60 11 - 3.7872e+02 1 386 12 7.6126e-01 3.4654e+02 2 702 27 9.5232e-01 2.9452e+02 3 1029 27 6.6332e-02 2.9904e+02 4 1357 36 1.3874e-01 3.0070e+02 5 1690 37 1.5379e-01 3.0200e+02 6 2014 50 1.7828e-01 3.0252e+02 7 2214 59 1.8536e-01 3.0320e+02 8 2344 60 1.9435e-01 3.0361e+02 9 2464 60 2.1055e-01 3.0388e+02 Pareto set found that satisfies the constraints. Optimization completed because the relative change in the volume of the Pareto set is less than 'options.ParetoSetChangeTolerance' and constraints are satisfied to within 'options.ConstraintTolerance'.
Examine the additional outputs.
fprintf("Exit flag %d.\n",exitflag)Exit flag 1.
disp(output)
iterations: 10
funccount: 2464
volume: 303.6076
averagedistance: 0.0250
spread: 0.2105
maxconstraint: 0
message: 'Pareto set found that satisfies the constraints. ↵↵Optimization completed because the relative change in the volume of the Pareto set ↵is less than 'options.ParetoSetChangeTolerance' and constraints are satisfied to within ↵'options.ConstraintTolerance'.'
rngstate: [1×1 struct]
Obtain and examine the Pareto front constraint residuals. Create a problem with the linear inequality constraint sum(x) <= -1/2 and the nonlinear inequality constraint norm(x)^2 <= 1.2. For improved accuracy, use 200 points on the Pareto front, and a ParetoSetChangeTolerance of 1e-7, and give the natural bounds -1.2 <= x(i) <= 1.2.
The nonlinear constraint function appears at the end of this example, and works if you run this example as a live script. To run this example otherwise, include the nonlinear constraint function as a file on your MATLAB® path.
fun = @(x)[norm(x-[1,2])^2;norm(x+[2,1])^2]; A = [1,1]; b = -1/2; lb = [-1.2,-1.2]; ub = -lb; nonlcon = @circlecons; rng default % For reproducibility options = optimoptions("paretosearch",ParetoSetChangeTolerance=1e-7,... PlotFcn=["psplotparetof" "psplotparetox"],ParetoSetSize=200);
Call paretosearch using all outputs.
[x,fval,exitflag,output,residuals] = paretosearch(fun,2,A,b,[],[],lb,ub,nonlcon,options);
Pareto set found that satisfies the constraints. Optimization completed because the relative change in the volume of the Pareto set is less than 'options.ParetoSetChangeTolerance' and constraints are satisfied to within 'options.ConstraintTolerance'.
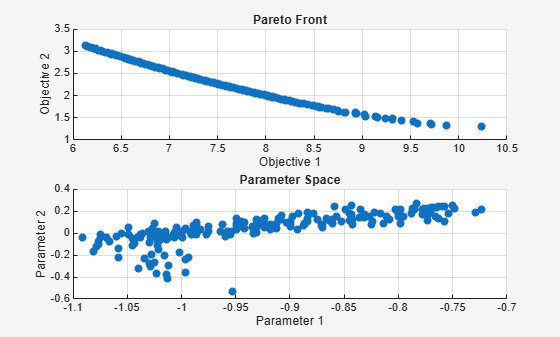
The inequality constraints reduce the size of the Pareto set compared to an unconstrained set. Examine the returned residuals.
fprintf("The maximum linear inequality constraint residual is %f.\n",max(residuals.ineqlin))The maximum linear inequality constraint residual is 0.000000.
fprintf("The maximum nonlinear inequality constraint residual is %f.\n",max(residuals.ineqnonlin))The maximum nonlinear inequality constraint residual is -0.002422.
The maximum returned residuals are negative, meaning that all the returned points are feasible. The maximum returned residuals are close to zero, meaning that each constraint is active for some points.
function [ineqnonlin,eqnonlin] = circlecons(x) eqnonlin = []; ineqnonlin = norm(x)^2 - 1.2; end
Input Arguments
Output Arguments
More About
Algorithms
paretosearch uses a pattern search to search for points on the
Pareto front. For details, see paretosearch Algorithm.
Alternative Functionality
App
The Optimize Live Editor task provides a visual interface for paretosearch.
Extended Capabilities
Version History
Introduced in R2018b