fitgeotrans
(Not recommended) Fit geometric transformation to control point pairs
fitgeotrans is not recommended. Use the fitgeotform2d function instead. For more information, see Version History.
Syntax
Description
tform = fitgeotrans(movingPoints,fixedPoints,tformType)tformType to
control point pairs movingPoints and
fixedPoints.
tform = fitgeotrans(movingPoints,fixedPoints,"polynomial",degree)PolynomialTransformation2D object to control point pairs
movingPoints and fixedPoints. Specify
the degree of the polynomial transformation, which can be 2, 3, or 4.
tform = fitgeotrans(movingPoints,fixedPoints,"pwl")PiecewiseLinearTransformation2D object to control point
pairs movingPoints and fixedPoints. This
transformation creates a Delaunay
triangulation of the fixed control points, and maps moving control points
to the corresponding fixed control points. A different affine transformation maps
control points in each local region. The mapping is continuous across the control
points, but is not continuously differentiable.
tform = fitgeotrans(movingPoints,fixedPoints,"lwm",n)LocalWeightedMeanTransformation2D object to control point
pairs movingPoints and fixedPoints. The
local weighted mean transformation creates a mapping, by inferring a polynomial at
each control point using neighboring control points. The mapping at any location
depends on a weighted average of these polynomials. The n
closest points are used to infer a second degree polynomial transformation for each
control point pair.
Examples
Create a checkerboard image and rotate it to create a misaligned image.
I = checkerboard(40);
J = imrotate(I,30);
imshowpair(I,J,"montage")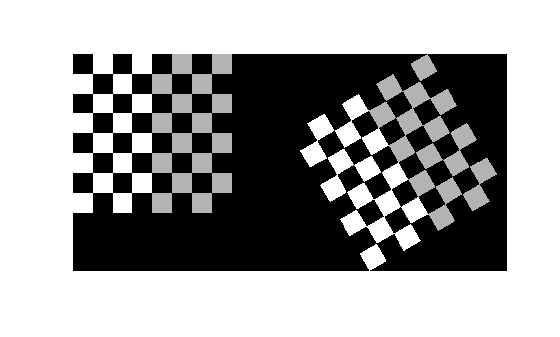
Define some matching control points on the fixed image (the checkerboard) and moving image (the rotated checkerboard). You can define points interactively using the Control Point Selection tool.
fixedPoints = [41 41; 281 161]; movingPoints = [56 175; 324 160];
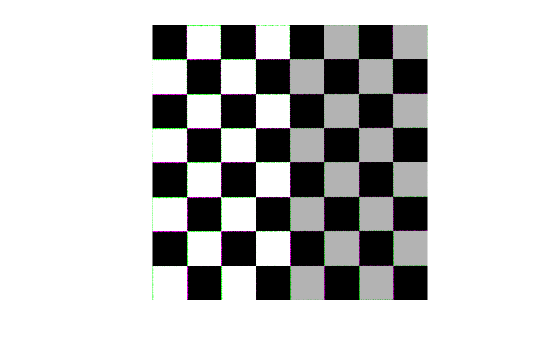
Create an affine geometric transformation that can be used to align the two images.
tform = fitgeotform2d(movingPoints,fixedPoints,"similarity");Use the tform estimate to resample the rotated image to register it with the fixed image. The regions of color (green and magenta) in the false color overlay image indicate error in the registration. This error comes from a lack of precise correspondence in the control points.
Jregistered = imwarp(J,tform,OutputView=imref2d(size(I))); imshowpair(I,Jregistered)
Input Arguments
Output Arguments
More About
The table lists all the transformation types supported by
fitgeotrans in order of complexity.
Transformation Type | Description | Minimum Number of Control Point Pairs | Example |
|---|---|---|---|
"nonreflectivesimilarity" | Use this transformation when shapes in the moving image are unchanged, but the image is distorted by some combination of translation, rotation, and scaling. Straight lines remain straight, and parallel lines are still parallel. | 2 |
|
"similarity" | Same as "nonreflectivesimilarity" with the
addition of optional reflection. | 3 |
|
"affine" | Use this transformation when shapes in the moving image exhibit shearing. Straight lines remain straight, and parallel lines remain parallel, but rectangles become parallelograms. | 3 |
|
"projective" | Use this transformation when the scene appears tilted. Straight lines remain straight, but parallel lines converge toward a vanishing point. | 4 |
|
"polynomial" | Use this transformation when objects in the image are curved. The higher the order of the polynomial, the better the fit, but the result can contain more curves than the fixed image. | 6 (order 2) 10 (order 3) 15 (order 4) |
|
"pwl" | Use this transformation (piecewise linear) when parts of the image appear distorted differently. | 4 |
|
"lwm" | Use this transformation (local weighted mean) when the distortion varies locally and piecewise linear is not sufficient. | 6 (12 recommended) |
|
References
[1] Goshtasby, Ardeshir. “Piecewise Linear Mapping Functions for Image Registration.” Pattern Recognition 19, no. 6 (January 1986): 459–66. https://doi.org/10.1016/0031-3203(86)90044-0.
[2] Goshtasby, Ardeshir. “Image Registration by Local Approximation Methods.” Image and Vision Computing 6, no. 4 (November 1988): 255–61. https://doi.org/10.1016/0262-8856(88)90016-9.