houghlines
Extract line segments based on Hough transform
Description
lines = houghlines(BW,theta,rho,peaks)BW
associated with particular bins in a Hough transform.
theta and rho are
the angles and perpendicular offset of lines, respectively,
corresponding to each bin of the Hough transform.
peaks lists the row and column
coordinates of peaks in the Hough transform matrix. The returned
value lines contains information about the
extracted line segments.
Examples
Read an image into the workspace, then rotate the image 33 degrees counterclockwise about the center of the image.
I = imread("circuit.tif"); rotI = imrotate(I,33,"crop");
Find the edges in the image by using the edge function.
BW = edge(rotI,"canny");Calculate the Hough transform of the rotated binary image.
[H,theta,rho] = hough(BW);
Find up to five peaks in the Hough transform matrix, H, by using the houghpeaks function.
maxpeaks = 5; thresh = ceil(0.3*max(H(:))); P = houghpeaks(H,maxpeaks,Threshold=thresh);
Find lines that have a length of at least 7 pixels. Before counting line lengths, fill in gaps that are smaller than 5 pixels.
lines = houghlines(BW,theta,rho,P,FillGap=5,MinLength=7);
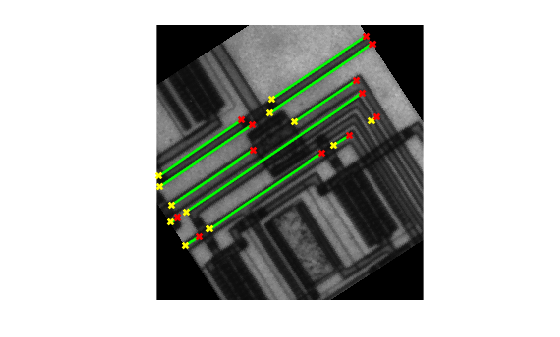
Display the original image, then overlay the detected lines in green. Also plot the start of each line in yellow and the end of each line in red.
imshow(rotI) hold on for k = 1:length(lines) xy = [lines(k).point1; lines(k).point2]; plot(xy(:,1),xy(:,2),LineWidth=2,Color="green"); plot(xy(1,1),xy(1,2),"x",LineWidth=2,Color="yellow"); plot(xy(2,1),xy(2,2),"x",LineWidth=2,Color="red"); end
Input Arguments
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced before R2006a