pchip
Piecewise Cubic Hermite Interpolating Polynomial (PCHIP)
Description
p = pchip(x,y,xq)p corresponding
to the query points in xq. The values of p are
determined by shape-preserving piecewise cubic
interpolation of x and y.
Examples
Compare the interpolation results produced by spline, pchip, and makima for two different data sets. These functions all perform different forms of piecewise cubic Hermite interpolation. Each function differs in how it computes the slopes of the interpolant, leading to different behaviors when the underlying data has flat areas or undulations.
Compare the interpolation results on sample data that connects flat regions. Create vectors of x values, function values at those points y, and query points xq. Compute interpolations at the query points using spline, pchip, and makima. Plot the interpolated function values at the query points for comparison.
x = -3:3; y = [-1 -1 -1 0 1 1 1]; xq1 = -3:.01:3; p = pchip(x,y,xq1); s = spline(x,y,xq1); m = makima(x,y,xq1); plot(x,y,'o',xq1,p,'-',xq1,s,'-.',xq1,m,'--') legend('Sample Points','pchip','spline','makima','Location','SouthEast')

In this case, pchip and makima have similar behavior in that they avoid overshoots and can accurately connect the flat regions.
Perform a second comparison using an oscillatory sample function.
x = 0:15; y = besselj(1,x); xq2 = 0:0.01:15; p = pchip(x,y,xq2); s = spline(x,y,xq2); m = makima(x,y,xq2); plot(x,y,'o',xq2,p,'-',xq2,s,'-.',xq2,m,'--') legend('Sample Points','pchip','spline','makima')

When the underlying function is oscillatory, spline and makima capture the movement between points better than pchip, which is aggressively flattened near local extrema.
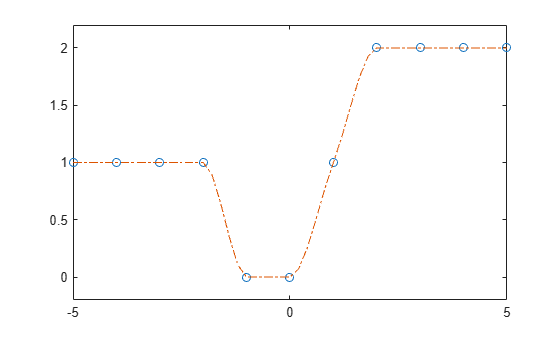
Create vectors for the x values and function values y, and then use pchip to construct a piecewise polynomial structure.
x = -5:5; y = [1 1 1 1 0 0 1 2 2 2 2]; p = pchip(x,y);
Use the structure with ppval to evaluate the interpolation at several query points. Plot the results.
xq = -5:0.2:5; pp = ppval(p,xq); plot(x,y,'o',xq,pp,'-.') ylim([-0.2 2.2])
Input Arguments
Output Arguments
More About
Tips
splineconstructs in almost the same waypchipconstructs . However,splinechooses the slopes at the differently, namely to make even continuous. This difference has several effects:splineproduces a smoother result, such that is continuous.splineproduces a more accurate result if the data consists of values of a smooth function.pchiphas no overshoots and less oscillation if the data is not smooth.pchipis less expensive to set up.The two are equally expensive to evaluate.
References
[1] Fritsch, F. N. and R. E. Carlson. "Monotone Piecewise Cubic Interpolation." SIAM Journal on Numerical Analysis. Vol. 17, 1980, pp.238–246.
[2] Kahaner, David, Cleve Moler, Stephen Nash. Numerical Methods and Software. Upper Saddle River, NJ: Prentice Hall, 1988.
Extended Capabilities
Version History
Introduced before R2006a