polybuffer
Create buffer around points, lines, or polyshape
objects
Syntax
Description
polyout = polybuffer(
returns a P,points=d)polyshape object
with boundaries that buffer the 2-D points in P by a distance
d. The polybuffer function computes
the buffer by taking the union of circles of radius d
centered at each point in P. The first column of the matrix
P contains the x-coordinates of the
points to buffer and the second column contains the corresponding
y-coordinates.
Once you create the polyshape object
polyout, you can analyze its properties or perform
additional computations using polyshape functions. For
example, you can access the vertices that define the buffered shape with the
property polyout.Vertices, and you can plot the shape using
the command plot(polyout).
polyout = polybuffer(
specifies a miter limit when the joint type is specified as
P,lines=d,JointType="miter",MiterLimit=lim)"miter". The miter limit is the maximum allowable ratio
between the distance a joint vertex is moved and the buffer distance
d. The limit lim must be greater than
or equal to 2.
polyout = polybuffer(
returns a polyin,d)polyshape object with boundaries that buffer the
input polyshape object polyin by a
distance d. For positive values of d,
solid region boundaries of polyin expand by
d units, and hole boundaries shrink by
d units. Negative values of d shrink
solid boundaries and expand hole boundaries.
Examples
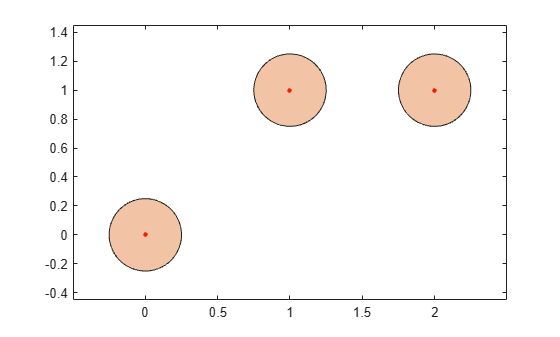
Create a matrix that contains the 2-D coordinates of three points. Then, create a polyshape object that buffers each point by a distance of 0.25 units.
P = [0 0; 1 1; 2 1]; polyout = polybuffer(P,points=0.25)
polyout =
polyshape with properties:
Vertices: [542×2 double]
NumRegions: 3
NumHoles: 0
Plot the original points and their buffer regions.
plot(P(:,1),P(:,2),"r.",MarkerSize=10) hold on plot(polyout) axis equal
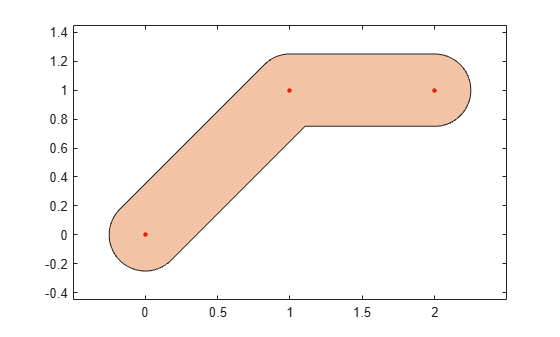
Create buffer regions surrounding line segments.
Create a matrix of 2-D points, and compute a polyshape object that buffers the line segments connecting the points.
P = [0 0; 1 1; 2 1]; polyout1 = polybuffer(P,lines=0.25); plot(P(:,1),P(:,2),"r.",MarkerSize=10) hold on plot(polyout1) axis equal hold off
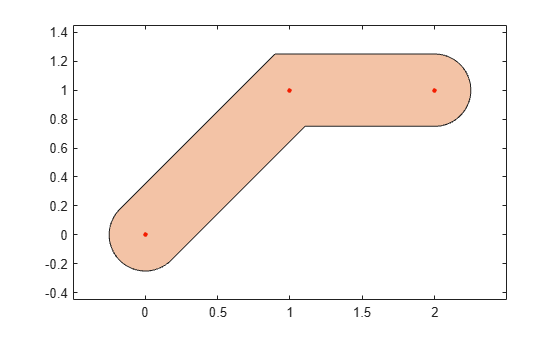
By default, polybuffer rounds out the joints that connect line segments. You can control the shape of joints by using the JointType argument. For example, use the value "miter" to preserve the angle connecting the two line segments.
figure polyout2 = polybuffer(P,lines=0.25,JointType="miter"); plot(P(:,1),P(:,2),"r.",MarkerSize=10) hold on plot(polyout2) axis equal
Create a polygon with a solid boundary and a hole boundary. Then, create a buffer at a distance of 0.1 from the boundaries. By default the buffer has rounded joints.
polyin = polyshape({[0 0 1 3],[0.5 1.5 1.5 0.5]}, ...
{[0 3 3 0],[0.5 0.5 1.5 1.5]});
plot(polyin)
polyout1 = polybuffer(polyin,0.1);
hold on
plot(polyout1)
hold off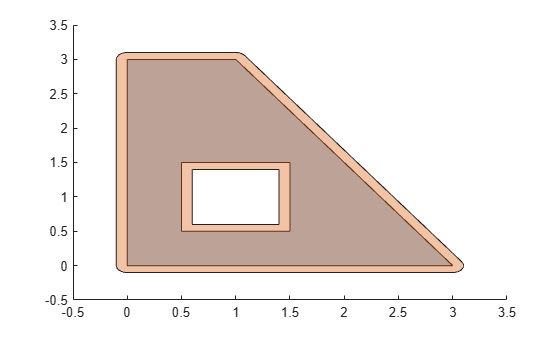
Create a buffer using a miter limit of 2. The miter limit controls the pointiness of the joints.
polyout2 = polybuffer(polyin,0.1, ... JointType="miter",MiterLimit=2); plot(polyin) hold on plot(polyout2)

Input Arguments
Extended Capabilities
Version History
Introduced in R2017b