Sensor Calibration and Position Sensing
Compute the Hall sequence and offsets for Hall sensor, quadrature encoder sensor, and ADC to accurately calculate the position and current feedback values.
Blocks
| Hall Speed and Position | Compute speed and estimate position of rotor by using Hall sensors |
| Hall Validity | Compute rotor spin direction and validity of Hall sensor sequence |
| Quadrature Decoder | Compute position of quadrature encoder |
| Resolver Decoder | Compute motor mechanical position and speed and sine and cosine values of motor electrical position |
| Mechanical to Electrical Position | Compute electrical position of rotor from mechanical position |
| Speed Measurement | Compute speed from rotor angular position |
Topics
- ADC Offset Calibration in FOC
Calibrate for ADC Offset in FOC.
- Position Sensor Offset Calibration for Quadrature Encoder and Hall Sensor
Calibrate for sensor-based control using blocks available in Motor Control Blockset.
- How to Use Hall Validity and Hall Speed and Position Blocks
Integrate Hall Validity and Hall Decoder blocks with field-oriented control (FOC) algorithm.
Featured Examples

Hall Offset Calibration for PMSM
Calculates the offset between the rotor direct axis (d-axis) and position detected by the Hall sensor. The field-oriented control (FOC) algorithm needs this position offset to run the permanent magnet synchronous motor (PMSM) correctly. To compute the offset, the target model runs the motor in the open-loop condition. The model uses a constant (voltage along the stator's
d-axis) and a zero (voltage along the stator's
q-axis) to run the motor (at a low constant speed) by using a position or ramp generator. When the position or ramp value reaches zero, the corresponding rotor position is the offset value for the Hall sensors.
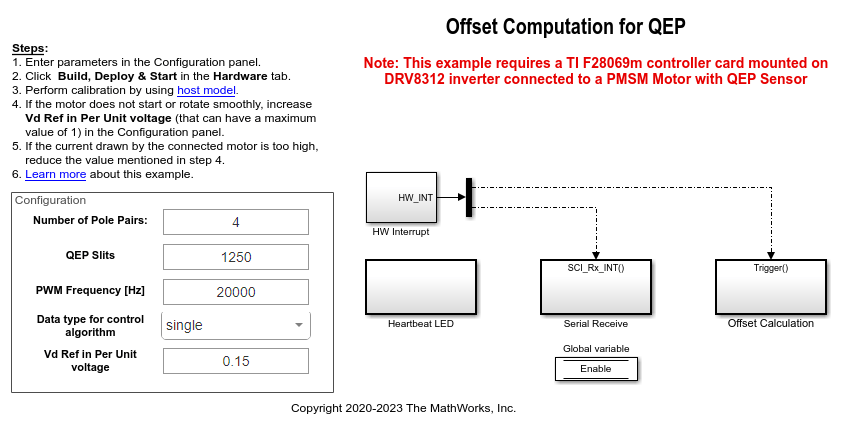
Quadrature Encoder Offset Calibration for PMSM
Calculates the offset between the d-axis of the rotor and encoder index pulse position as detected by the quadrature encoder sensor. The control algorithm (available in the field-oriented control and parameter estimation examples) uses this offset value to compute an accurate and precise position of the d-axis of rotor. The controller needs this position to implement the field-oriented control (FOC) correctly in the rotor flux reference frame (d-q reference frame), and therefore, run the permanent magnet synchronous motor (PMSM) correctly.

Run 3-Phase AC Motors in Open-Loop Control and Calibrate ADC Offset
Uses open-loop control (also known as scalar control or Volts/Hz control) to run a motor. This technique varies the stator voltage and frequency to control the rotor speed without using any feedback from the motor. You can use this technique to check the integrity of the hardware connections. A constant speed application of open-loop control uses a fixed-frequency motor power supply. An adjustable speed application of open-loop control needs a variable-frequency power supply to control the rotor speed. To ensure a constant stator magnetic flux, keep the supply voltage amplitude proportional to its frequency.

Hall Sensor Sequence Calibration of BLDC Motor
Calculates the Hall sensor sequence with respect to position zero of the rotor in open-loop control. This workflow helps you to spin the motor using six-step commutation without the need to label the hall sensors or derive the switching sequence. Run this example and obtain the hall sequence, and use this hall sequence with the Six Step Commutation block to run the motor in closed loop as explained in Six-Step Commutation of BLDC Motor Using Sensor Feedback example.
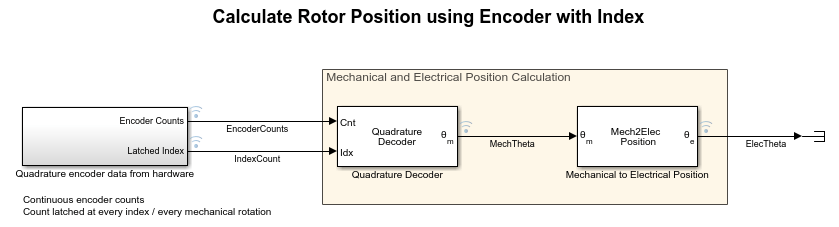
Simulate Calculation of Rotor Position Using Quadrature Decoder Block
Use the quadrature decoder block to simulate estimation of rotor position.

Monitor Resolver Using Serial Communication
Use the resolver sensor to measure the rotor position. The resolver consists of two stator (secondary) windings placed orthogonally around the resolver rotor (primary) winding. After you mount the resolver sensor over a PMSM, the resolver rotor winding rotates with the shaft of the running motor. Meanwhile, the controller provides a fixed-frequency excitation signal (alternating sinusoidal or square pulse) to the primary winding.