trajectoryGeneratorFrenet
Find optimal trajectory along reference path
Description
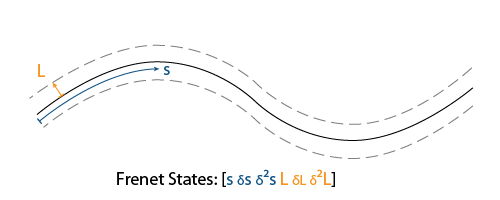
The trajectoryGeneratorFrenet object generates alternate
trajectories using fourth or fifth-order polynomials relative to a given reference path. Each
trajectory defines a motion between Frenet states over a specified time span.
Frenet states describe their position, velocity and acceleration relative to a static
reference path, specified as a referencePathFrenet
object.
The object expresses Frenet states as a vector of form [S dS ddS L dL
ddL], where S is the arc length and L is the
perpendicular deviation from the direction of the reference path. Derivatives of
S are relative to time. Derivatives of L are relative
to the arc length, S.
To generate alternative trajectories, specify the initial and terminal Frenet states with
a given time span to the connect object
function.
Creation
Syntax
Description
connectorFrenet = trajectoryGeneratorFrenet(
generates trajectories between initial and terminal states relative to a reference path
refPath)refPath specified as a referencePathFrenet object. The refPath input argument
sets the ReferencePath
property.
connectorFrenet = trajectoryGeneratorFrenet(
specifies the time interval for discretization. The refPath,'TimeResolution',timeValue)timeValue
argument sets the TimeResolution
property.
Properties
Object Functions
connect | Connect initial and terminal Frenet states |
createParallelState | Create states using Frenet and global parameters |
Examples
Generate alternative trajectories for a reference path using Frenet coordinates. Specify different initial and terminal states for your trajectories. Tune your states based on the generated trajectories.
Generate a reference path from a set of waypoints. Create a trajectoryGeneratorFrenet object from the reference path.
waypoints = [0 0; ... 50 20; ... 100 0; ... 150 10]; refPath = referencePathFrenet(waypoints); connector = trajectoryGeneratorFrenet(refPath);
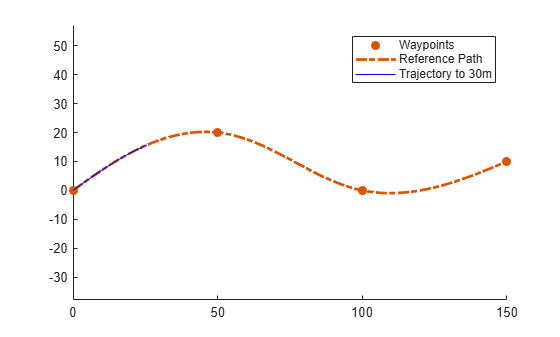
Generate a five-second trajectory between the path origin and a point 30 m down the path as Frenet states.
initState = [0 0 0 0 0 0]; % [S ds ddS L dL ddL] termState = [30 0 0 0 0 0]; % [S ds ddS L dL ddL] [~,trajGlobal] = connect(connector,initState,termState,5);
Display the trajectory in global coordinates.
show(refPath); hold on axis equal plot(trajGlobal.Trajectory(:,1),trajGlobal.Trajectory(:,2),'b') legend(["Waypoints","Reference Path","Trajectory to 30m"])
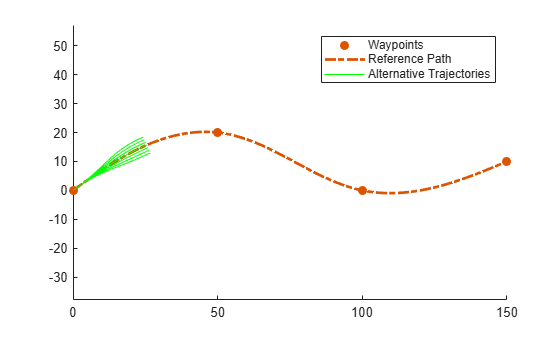
Create a matrix of terminal states with lateral deviations between –3 m and 3 m. Generate trajectories that cover the same arc length in 10 seconds, but deviate laterally from the reference path. Display the new alternative paths.
termStateDeviated = termState + ([-3:3]' * [0 0 0 1 0 0]); [~,trajGlobal] = connect(connector,initState,termStateDeviated,10); clf show(refPath); hold on axis equal for i = 1:length(trajGlobal) plot(trajGlobal(i).Trajectory(:,1),trajGlobal(i).Trajectory(:,2),'g') end legend(["Waypoints","Reference Path","Alternative Trajectories"]) hold off
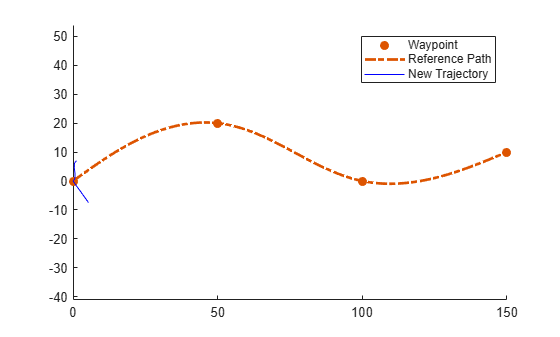
Specify a new terminal state to generate a new trajectory. This trajectory is not desirable because it requires reverse motion to achieve a longitudinal velocity of 10 m/s.
newTermState = [5 10 0 5 0 0]; [~,newTrajGlobal] = connect(connector,initState,newTermState,3); clf show(refPath); hold on axis equal plot(newTrajGlobal.Trajectory(:,1),newTrajGlobal.Trajectory(:,2),'b'); legend(["Waypoint","Reference Path","New Trajectory"]) hold off
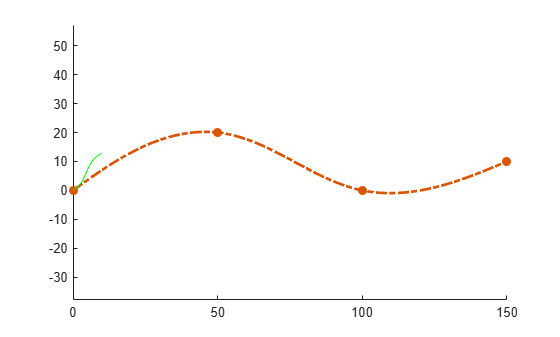
Relax the restriction on the longitudinal state by specifying an arc length of NaN. Generate and display the trajectory again. The new position shows a good alternative trajectory that deviates off the reference path.
relaxedTermState = [NaN 10 0 5 0 0]; [~,trajGlobalRelaxed] = connect(connector,initState,relaxedTermState,3); clf show(refPath); hold on axis equal plot(trajGlobalRelaxed.Trajectory(:,1),trajGlobalRelaxed.Trajectory(:,2),'g'); hold off
References
[1] Werling, Moritz, Julius Ziegler, Sören Kammel, and Sebastian Thrun. "Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame." 2010 IEEE International Conference on Robotics and Automation. 2010, pp. 987–993.
Extended Capabilities
Version History
Introduced in R2020b