Solve Constrained Nonlinear Optimization, Problem-Based
This example shows how to find the minimum of a nonlinear objective function with a nonlinear constraint by using the problem-based approach. For a video showing the solution to a similar problem, see Problem-Based Nonlinear Programming.
To find the minimum value of a nonlinear objective function using the problem-based approach, first write the objective function as a file or anonymous function. The objective function for this example is
function f = objfunx(x,y) f = exp(x).*(4*x.^2 + 2*y.^2 + 4*x.*y + 2*y - 1); end
Create the optimization problem variables x and y.
x = optimvar("x"); y = optimvar("y");
Create the objective function as an expression of the optimization variables.
obj = objfunx(x,y);
Create an optimization problem with obj as the objective function.
prob = optimproblem(Objective=obj);
Create a nonlinear constraint that the solution lies in a tilted ellipse, specified as
Create the constraint as an inequality expression of the optimization variables.
TiltEllipse = x.*y/2 + (x+2).^2 + (y-2).^2/2 <= 2;
Include the constraint in the problem.
prob.Constraints.constr = TiltEllipse;
Create a structure representing the initial point as x = –3, y = 3.
x0.x = -3; x0.y = 3;
Review the problem.
show(prob)
OptimizationProblem :
Solve for:
x, y
minimize :
(exp(x) .* (((((4 .* x.^2) + (2 .* y.^2)) + ((4 .* x) .* y)) + (2 .* y)) - 1))
subject to constr:
((((x .* y) ./ 2) + (x + 2).^2) + ((y - 2).^2 ./ 2)) <= 2
Solve the problem.
[sol,fval] = solve(prob,x0)
Solving problem using fmincon. Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
sol = struct with fields:
x: -5.2813
y: 4.6815
fval = 0.3299
Try a different start point.
x0.x = -1; x0.y = 1; [sol2,fval2] = solve(prob,x0)
Solving problem using fmincon. Feasible point with lower objective function value found, but optimality criteria not satisfied. See output.bestfeasible.. Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
sol2 = struct with fields:
x: -0.8210
y: 0.6696
fval2 = 0.7626
Plot the ellipse, the objective function contours, and the two solutions.
f = @objfunx; g = @(x,y) x.*y/2+(x+2).^2+(y-2).^2/2-2; rnge = [-5.5 -0.25 -0.25 7]; fimplicit(g,"k-") axis(rnge); hold on fcontour(f,rnge,LevelList=logspace(-1,1)) plot(sol.x,sol.y,"ro",LineWidth=2) plot(sol2.x,sol2.y,"ko",LineWidth=2) legend("Constraint","f Contours","Global Solution","Local Solution",Location="northeast"); hold off
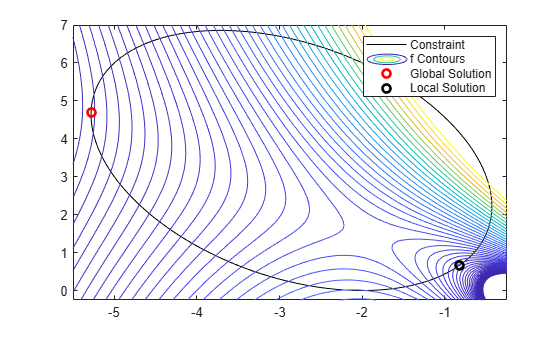
The solutions are on the nonlinear constraint boundary. The contour plot shows that these are the only local minima. The plot also shows that there is a stationary point near [–2,3/2], and local maxima near [–2,0] and [–1,4].
Convert Objective Function Using fcn2optimexpr
For some objective functions or software versions, you must convert nonlinear functions to optimization expressions by using fcn2optimexpr. See Supported Operations for Optimization Variables and Expressions and Convert Nonlinear Function to Optimization Expression. Pass the x and y variables in the fcn2optimexpr call to indicate which optimization variable corresponds to each objfunx input.
obj = fcn2optimexpr(@objfunx,x,y);
Create an optimization problem with obj as the objective function just as before.
prob = optimproblem(Objective=obj);
The remainder of the solution process is identical.