move
Position, velocity, and orientation of moving bicyclist
Syntax
Description
[
returns the current positions, bpos,bvel,bax] = move(bicyclist,T,angh)bpos, and current velocities,
bvel, of the scatterers and the current orientation axes,
bax, of the bicyclist. The positions, velocities, and axes are then
updated for the next time interval T. angh
specifies the heading angle of the bicyclist.
Examples
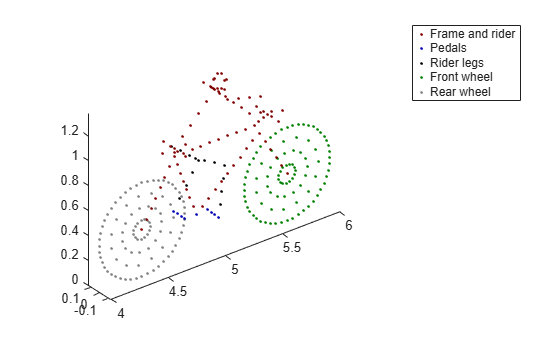
Plot the positions of all bicyclist scatterers. Assume there are 15 spokes per wheel.
Create a backscatterBicyclist object for a radar system operating at 77 GHz and having a bandwidth of 300 MHz. The sampling rate is twice the bandwidth. The bicyclist is initially 5 meters away from the radar.
bw = 300e6; fs = 2*bw; fc = 77e9; rpos = [0;0;0]; bpos = [5;0;0]; bicyclist = backscatterBicyclist( ... 'OperatingFrequency',fc,'NumWheelSpokes',15, ... 'InitialPosition',bpos);
Obtain the initial position of the scatterers and advance the motion by 1 second.
[bpos,bvel,bax] = move(bicyclist,1,0);
Obtain the number of scatterers and the indices of the wheel scatterers.
N = getNumScatterers(bicyclist); Nsw = (N-114+1)/2; idxfrontwheel = (114:(114 + Nsw - 1)); idxrearwheel = (114 + Nsw):N;
Plot the locations of the scatterers.
plot3(bpos(1,1:90),bpos(2,1:90),bpos(3,1:90), ... 'LineStyle','none','Color',[0.5,0,0],'Marker','.') axis equal hold on plot3(bpos(1,91:99),bpos(2,91:99),bpos(3,91:99), ... 'LineStyle','none','Color',[0,0,0.7],'Marker','.') plot3(bpos(1,100:113),bpos(2,100:113),bpos(3,100:113), ... 'LineStyle','none','Color',[0,0,0],'Marker','.') plot3(bpos(1,idxfrontwheel),bpos(2,idxfrontwheel),bpos(3,idxfrontwheel), ... 'LineStyle','none','Color',[0,0.5,0],'Marker','.') plot3(bpos(1,idxrearwheel),bpos(2,idxrearwheel),bpos(3,idxrearwheel), ... 'LineStyle','none','Color',[0.5,0.5,0.5],'Marker','.') hold off legend('Frame and rider','Pedals','Rider legs','Front wheel','Rear wheel')
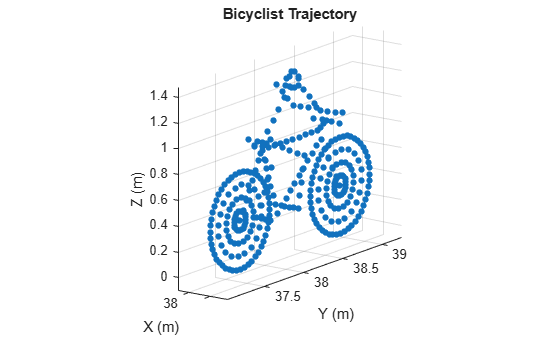
Display an animation of a bicyclist riding in a quarter circle. Use the default property values of the backscatterBicyclist object. The motion is updated at 30 millisecond intervals for 500 steps.
dt = 0.03; M = 500; angstep = 90/M; bicycle = backscatterBicyclist; for m = 1:M [bpos,bvel,bang] = move(bicycle,dt,angstep*m); plot(bicycle) end
Input Arguments
Output Arguments
More About
Extended Capabilities
Version History
Introduced in R2021a