Inverse Dynamics
Required joint torques for given motion
Libraries:
Robotics System Toolbox /
Manipulator Algorithms
Description
The Inverse Dynamics block returns the joint torques required for the robot to maintain the specified robot state. To get the required joint torques, specify the robot configuration (joint positions), joint velocities, joint accelerations, and external forces.
Examples
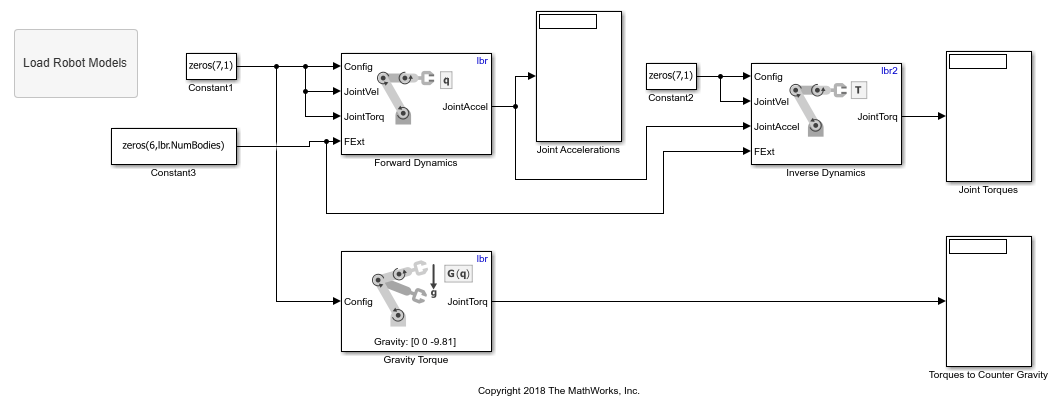
Calculate Manipulator Gravity Dynamics in Simulink
Use the manipulator algorithm blocks to compute and compare dynamics due to gravity for a manipulator robot.

Compute Velocity Product for Manipulators in Simulink
Calculate velocity-induced torques in manipulators using Simulink® manipulator algorithm blocks.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2018a
See Also
Blocks
- Forward Dynamics | Get Jacobian | Gravity Torque | Joint Space Mass Matrix | Velocity Product Torque