trapveltraj
Generate trajectories with trapezoidal velocity profiles
Syntax
Description
[
generates a trajectory through a given set of input waypoints that follow a trapezoidal
velocity profile. The function outputs positions, velocities, and accelerations at the given
time samples, q,qd,qdd,tSamples,pp] = trapveltraj(wayPoints,numSamples)tSamples, based on the specified number of samples,
numSamples. The function also returns the piecewise polynomial
pp form of the polynomial trajectory with respect to time.
[
specifies additional parameters using q,qd,qdd,tSamples,pp] = trapveltraj(wayPoints,numSamples,Name,Value)Name,Value pair arguments.
Examples
Use the trapveltraj function with a given set of 2-D xy waypoints.
wpts = [0 45 15 90 45; 90 45 -45 15 90];
Compute the trajectory for a given number of samples (501). The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and polynomial coefficients (pp) of the polynomial that achieves the waypoints using trapezoidal velocities.
[q,qd,qdd,tvec,pp] = trapveltraj(wpts,501);
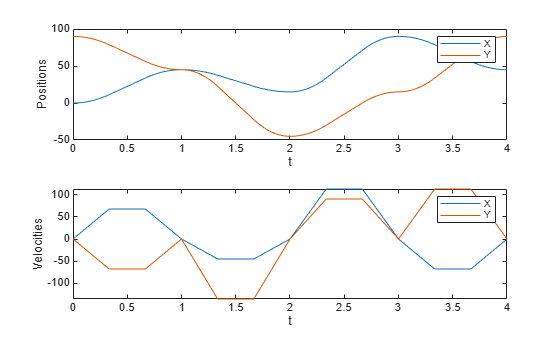
Plot the trajectories for the x- and y-positions and the trapezoidal velocity profile between each waypoint.
subplot(2,1,1) plot(tvec, q) xlabel('t') ylabel('Positions') legend('X','Y') subplot(2,1,2) plot(tvec, qd) xlabel('t') ylabel('Velocities') legend('X','Y')
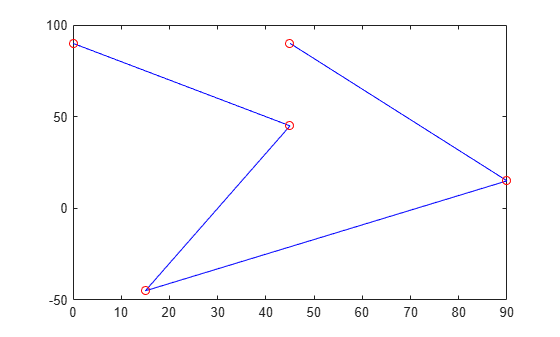
You can also verify the actual positions in the 2-D plane. Plot the separate rows of the q vector and the waypoints as x- and *y-*positions.
figure plot(q(1,:),q(2,:),'-b',wpts(1,:),wpts(2,:),'or')
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning and Control. Cambridge: Cambridge University Press, 2017.
[2] Spong, Mark W., Seth Hutchinson, and M. Vidyasagar. Robot Modeling and Control. John Wiley & Sons, 2006.
Extended Capabilities
Version History
Introduced in R2019a