firls
Least-squares linear-phase FIR filter design
Description
Examples
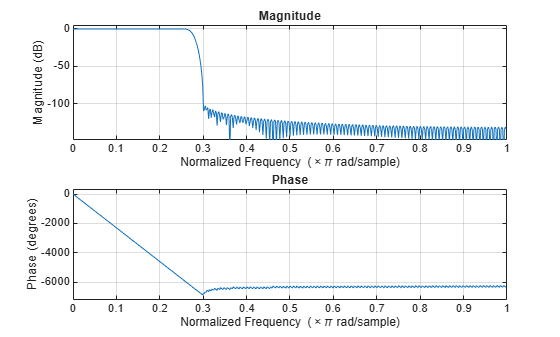
Design an FIR lowpass filter of order 255 with a transition region between and . Display the magnitude and phase responses of the filter.
b = firls(255,[0 0.25 0.3 1],[1 1 0 0]); freqz(b,1)
An ideal differentiator has a frequency response given by . Design a differentiator of order 30 that attenuates frequencies above . Include a factor of in the amplitude because the frequencies are normalized by . Display the zero-phase response of the filter.
b = firls(30,[0 0.9],[0 0.9*pi],'differentiator');
zerophase(b,1)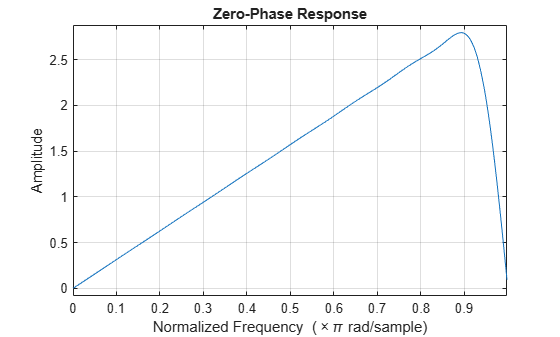
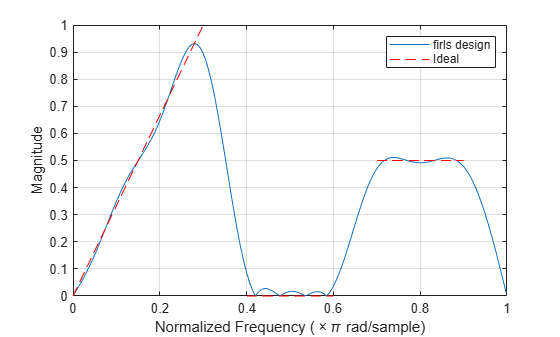
Design a 24th-order antisymmetric filter with piecewise linear passbands.
F = [0 0.3 0.4 0.6 0.7 0.9];
A = [0 1.0 0.0 0.0 0.5 0.5];
b = firls(24,F,A,'hilbert');Plot the desired and actual frequency responses.
[H,f] = freqz(b,1,512,2); plot(f,abs(H)) hold on for i = 1:2:6, plot([F(i) F(i+1)],[A(i) A(i+1)],'r--') end legend('firls design','Ideal') grid on xlabel('Normalized Frequency (\times\pi rad/sample)') ylabel('Magnitude')
Design an FIR lowpass filter. The passband ranges from DC to rad/sample. The stopband ranges from rad/sample to the Nyquist frequency. Produce three different designs, changing the weights of the bands in the least-squares fit.
In the first design, make the stopband weight higher than the passband weight by a factor of 100. Use this specification when it is critical that the magnitude response in the stopband is flat and close to 0. The passband ripple is about 100 times higher than the stopband ripple.
bhi = firls(18,[0 0.45 0.55 1],[1 1 0 0],[1 100]);
In the second design, reverse the weights so that the passband weight is 100 times the stopband weight. Use this specification when it is critical that the magnitude response in the passband is flat and close to 1. The stopband ripple is about 100 times higher than the passband ripple.
blo = firls(18,[0 0.45 0.55 1],[1 1 0 0],[100 1]);
In the third design, give the same weight to both bands. The result is a filter with similar ripple in the passband and the stopband.
b = firls(18,[0 0.45 0.55 1],[1 1 0 0],[1 1]);
Visualize the magnitude responses of the three filters.
zerophase(bhi,1) hold on zerophase(blo,1) zerophase(b,1) hold off ylim([-.2 1.2]) legend(["bhi: w = [1 100]" "blo: w = [100 1]" "b: w = [1 1]"])
![Figure contains an axes object. The axes object with title Zero-Phase Response, xlabel Normalized Frequency ( times pi rad/sample), ylabel Amplitude contains 3 objects of type line. These objects represent bhi: w = [1 100], blo: w = [100 1], b: w = [1 1].](../../examples/signal/win64/LowpassFilterDesignWithWeightedFitExample_01.png)
Input Arguments
Output Arguments
More About
If you design a filter such that the product of the filter length and the transition width is large, you might get this warning message: Matrix is close to singular or badly scaled. The following example illustrates this limitation.
b = firls(100,[0 0.15 0.85 1],[1 1 0 0]);
Warning: Matrix is close to singular or badly scaled. Results may be inaccurate. RCOND = 7.567453e-19.
freqz(b,1)
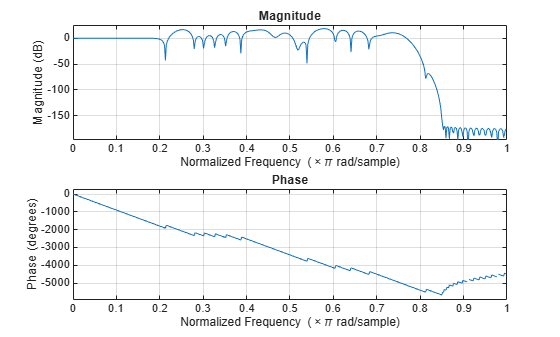
In this case, the filter coefficients b might not represent the desired filter. You can check the filter by looking at its frequency response.
Algorithms
firls designs a linear-phase FIR filter that minimizes the weighted
integrated squared error between an ideal piecewise linear function and the magnitude response
of the filter over a set of desired frequency bands.
Reference [2] describes the theoretical
approach behind firls. The function solves a system of linear equations
using the MATLAB®
\ operator. For a filter of order n, the solution of the equation system involves an inner-product square matrix
of size L, where L = (n–1)/2 + 1 when n is odd, and L = n/2 + 1 when n is even.
The input arguments f and a specify the frequency-amplitude characteristics of the filter:
f is a vector of pairs of frequency points, specified in the range 0 to 1, where 1 corresponds to the Nyquist frequency. The frequencies must be in increasing order. You can specify duplicate frequency points.
a is a vector containing the desired amplitudes at the points specified in f.
The desired amplitude function at frequencies between pairs of points (f(k), f(k+1)) for k odd is the line segment connecting the points (f(k), a(k)) and (f(k+1), a(k+1)).
The desired amplitude function at frequencies between pairs of points (f(k), f(k+1)) for k even is unspecified. These are transition ("don’t care") regions.
f and a are the same length. This length must be an even number.
This figure illustrates the relationship between the vectors f and a in defining a desired amplitude response.

The firls function designs type I, II, III, and IV linear-phase
filters. Type I and II are the default filters when n is even and odd, respectively, while the
'hilbert' and 'differentiator' flags produce type III
(n is even) and IV (n is odd) filters. The various filter types have different symmetries and
constraints on their frequency responses (see [1] for details).
| Linear Phase Filter Type | Filter Order | Symmetry of Coefficients | Response H(f), f = 0 | Response H(f), f = 1 (Nyquist) |
|---|---|---|---|---|
Type I | Even | No restriction | No restriction | |
Type II | Odd | No restriction | H(1) = 0 | |
Type III | Even | H(0) = 0 | H(1) = 0 | |
Type IV | Odd | H(0) = 0 | No restriction |
References
[1] Oppenheim, Alan V., and Ronald W. Schafer, with John R. Buck. Discrete-Time Signal Processing. Upper Saddle River, NJ: Prentice Hall, 1999.
[2] Parks, Thomas W., and C. Sidney Burrus. Digital Filter Design. Hoboken, NJ: John Wiley & Sons, 1987, pp. 54–83.