sgolayfilt
Savitzky-Golay filtering
Description
Examples
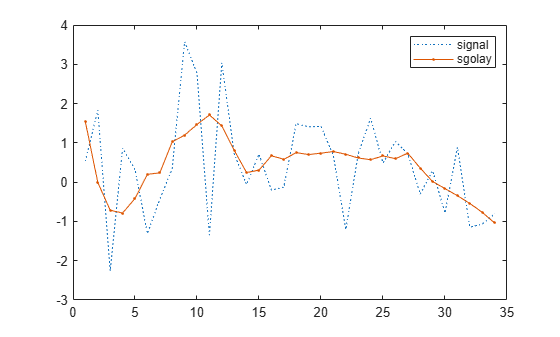
Generate a random signal and smooth it using sgolayfilt. Specify a polynomial order of 3 and a frame length of 11. Plot the original and smoothed signals.
order = 3; framelen = 11; lx = 34; x = randn(lx,1); sgf = sgolayfilt(x,order,framelen); plot(x,':') hold on plot(sgf,'.-') legend('signal','sgolay')
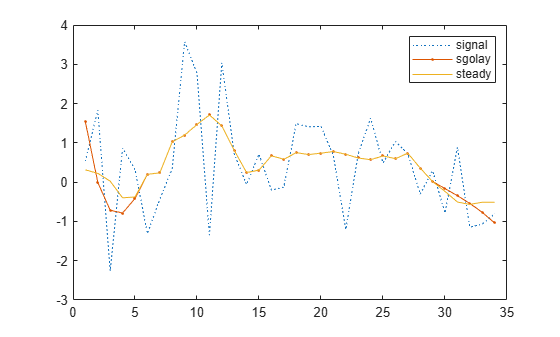
The sgolayfilt function performs most of the filtering by convolving the signal with the center row of B, the output of sgolay. The result is the steady-state portion of the filtered signal. Generate and plot this portion.
m = (framelen-1)/2; B = sgolay(order,framelen); steady = conv(x,B(m+1,:),'same'); plot(steady) legend('signal','sgolay','steady')
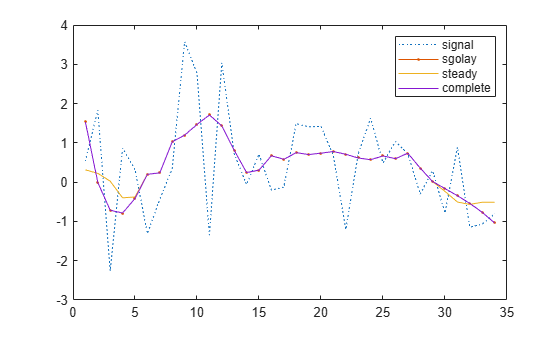
Samples close to the signal edges cannot be placed at the center of a symmetric window and have to be treated differently.
To determine the startup transient, matrix multiply the first (framelen-1)/2 rows of B by the first framelen samples of the signal.
ybeg = B(1:m,:)*x(1:framelen);
To determine the terminal transient, matrix multiply the final (framelen-1)/2 rows of B by the final framelen samples of the signal.
yend = B(framelen-m+1:framelen,:)*x(lx-framelen+1:lx);
Concatenate the transients and the steady-state portion to generate the complete signal.
cmplt = steady; cmplt(1:m) = ybeg; cmplt(lx-m+1:lx) = yend; plot(cmplt) legend('signal','sgolay','steady','complete') hold off
Adding weights to the minimization breaks the symmetry of B and requires extra steps for a proper solution.
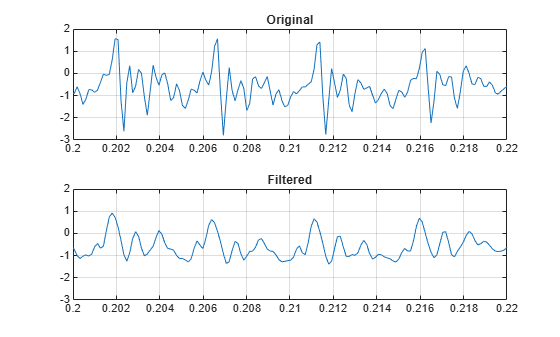
Load a speech signal sampled at . The file contains a recording of a female voice saying the word "MATLAB®."
load mtlb
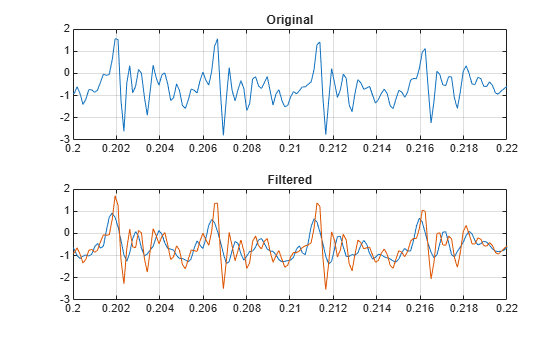
t = (0:length(mtlb)-1)/Fs;Smooth the signal by applying a Savitzky-Golay filter of polynomial order 9 to data frames of length 21. Plot the original and filtered signals. Zoom in on a 0.02-second interval.
rd = 9; fl = 21; smtlb = sgolayfilt(mtlb,rd,fl); subplot(2,1,1) plot(t,mtlb) axis([0.2 0.22 -3 2]) title('Original') grid subplot(2,1,2) plot(t,smtlb) axis([0.2 0.22 -3 2]) title('Filtered') grid
Repeat the calculation, but now use a Kaiser window as a weighting vector. Specify a shape factor . Plot the new filtered signal.
kmtlb = sgolayfilt(mtlb,rd,fl,kaiser(fl,38)); subplot(2,1,2) hold on plot(t,kmtlb) axis([0.2 0.22 -3 2]) hold off
Input Arguments
Output Arguments
Tips
Savitzky-Golay smoothing filters are typically used to "smooth out" a noisy signal whose frequency span (without noise) is large. They are also called digital smoothing polynomial filters or least-squares smoothing filters. Savitzky-Golay filters perform better in some applications than standard averaging FIR filters, which tend to filter high-frequency content along with the noise. Savitzky-Golay filters are more effective at preserving high frequency signal components but less successful at rejecting noise.
Savitzky-Golay filters are optimal in the sense that they minimize the least-squares
error in fitting a polynomial to frames of noisy data. See sgolay for more information about the Savitzky-Golay algorithm.
References
[1] Orfanidis, Sophocles J. Introduction to Signal Processing. Englewood Cliffs, NJ: Prentice Hall, 1996.
[2] Schafer, Ronald. “What Is a Savitzky-Golay Filter? [Lecture Notes].” IEEE Signal Processing Magazine 28, no. 4 (July 2011): 111–17. https://doi.org/10.1109/MSP.2011.941097.
Extended Capabilities
Version History
Introduced before R2006a