Reduced Order Modeler
Create reduced order models based on Simulink models, subsystems within models, or simulation data
Since R2025b
Description
Add-On Required: This feature requires the Reduced Order Modeler for MATLAB add-on.
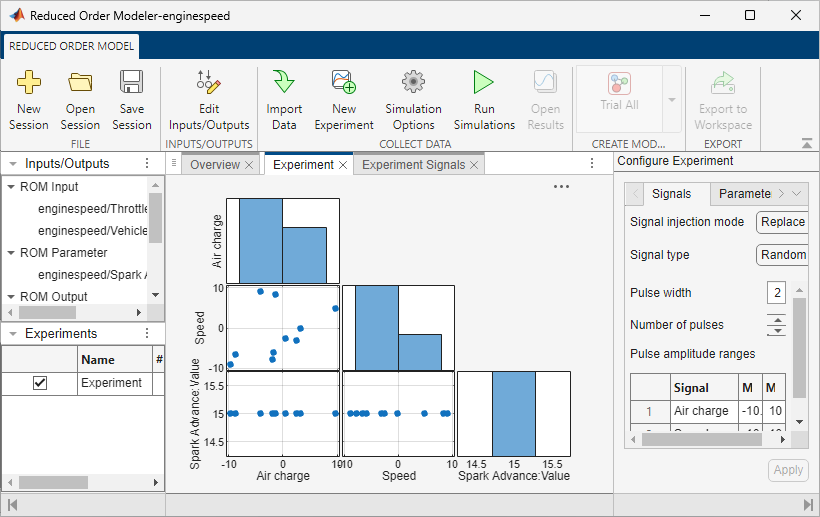
The Reduced Order Modeler app creates AI-based reduced order models (ROMs) of systems modeled in Simulink®, including full-order, high-fidelity third-party simulation models and subsystems within models. You can also use the app to create ROMs using existing time-domain data. You can use the created ROMs as surrogates for more computationally complex models in applications that require running many simulations.
Using the app, you can:
Configure experiments to generate input-output training data from a high-fidelity model, or import existing time-domain data for training.
Train ROMs using pre-configured templates and identify the model that best fits the data.
Export trained ROMs to Simulink.
After exporting a ROM, you can use it for system-level desktop simulation, control design, hardware-in-the-loop (HIL) testing, virtual sensor modeling, and creation of functional mockup units (FMUs). You can use FMUs outside of MATLAB® and Simulink.
To install the Reduced Order Modeler for MATLAB Support Package, locate the add-on in Add-On Explorer using the instructions in Get and Manage Add-Ons.
Open the Reduced Order Modeler App
MATLAB command prompt: Enter
reducedOrderModeler.
Examples
- Configure Options in Reduced Order Modeler
- Import Datastore into Reduced Order Modeler (System Identification Toolbox)
- Reduced Order Model of an Airframe (System Identification Toolbox)
- Reduced Order Modeling of Subsystems in Engine Model (System Identification Toolbox)
- Reduced Order Model of a Jet Engine Turbine Blade (System Identification Toolbox)
- Reduced Order Modeling of Battery Electric Vehicle Thermal Management System (System Identification Toolbox)
- Reduced Order Model of a Jet Engine Turbine Blade from Data (System Identification Toolbox)