Simulink.BlockDiagram.getInitialState
Get initial state data from block diagram
Description
x0 = Simulink.BlockDiagram.getInitialState(mdlName)mdlName and returns the initial
values for block states in the model, including states for blocks inside referenced models.
If the Save format parameter value for the model is
Dataset, thenx0is aSimulink.SimulationData.Datasetobject that contains the initial state information for blocks in the model.If the Save format parameter for the model is anything other than
Dataset, thenx0is a structure that contains the initial state information for blocks in the model.
You can use this initial state information to specify initial block state values for simulation or to provide an initial condition for linearization. You can use the state information as-is, or you can modify individual state values or remove state values from the structure if you want to specify state information for a subset of block states.
To simulate a model from an initial simulation state or operating point, consider
using a Simulink.op.ModelOperatingPoint object instead. The
ModelOperatingPoint object contains complete information about
the model operating point, including block states, hidden block states, the state of
the solver and execution engine, and output values for some blocks. For more
information, see Specify Initial State for Simulation.
Examples
Open the model vdp. The model uses two Integrator blocks, each of which has one state.
mdl = "vdp";
open_system(mdl)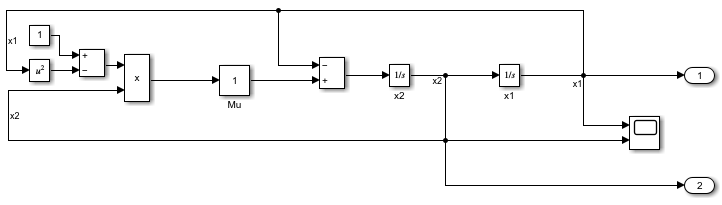
The Save format parameter of the model specifies whether the Simulink.BlockDiagram.getInitialState function returns a structure or a Simulink.SimulationData.Dataset object. Set the parameter value to Dataset.
In the Simulink® Toolstrip, on the Modeling tab, click Model Settings.
In the Configuration Parameters dialog box, select the Data Import/Export pane.
From the Save format list, select
Dataset.In the Configuration Parameters dialog box, click OK.
Alternatively, use the set_param function to specify the value for the SaveFormat parameter.
set_param(mdl,SaveFormat="Dataset")Get the Dataset object of block states for the model using the Simulink.BlockDiagram.getInitialState function.
initstates = Simulink.BlockDiagram.getInitialState(mdl)
initstates =
Simulink.SimulationData.Dataset 'xFinal' with 2 elements
Name BlockPath
____ _________
1 [1x1 State] '' vdp/x1
2 [1x1 State] '' vdp/x2
- Use braces { } to access, modify, or add elements using index.
Set the value of the state for the Integrator block named x2 to 2.
initstates{2}.Values.Data = 2;Remove the element with the state information for the Integrator block named x1.
initstates = removeElement(initstates,1);
Specify the variable initStates, which includes an initial state value for the Integrator block named x2 as the initial state for the model.
In the Simulink Toolstrip, on the Modeling tab, click Model Settings.
In the Configuration Parameters dialog box, select the Data Import/Export pane.
Select Initial state. Then, in the box, enter
initStates.Click OK.
Alternatively, use the set_param function to configure the LoadInitialState and InitialState parameters.
set_param(mdl,LoadInitialState="on",InitialState="initstates")
Simulate the model.
out = sim(mdl);
To view the output signals for both Integrator blocks, double-click the Scope block. Alternatively, open the Scope window using the open_system function.
blk = mdl + "/Scope";
open_system(blk)
For both Integrator blocks, the initial output value and initial state value are both 2. For the Integrator block named x2, the initial state value of 2 comes from the value of the Initial state parameter. For the Integrator block named x1, the initial state value of 2 is specified in the block parameters.
blk = mdl +"/x1"; get_param(blk,"InitialCondition")
ans = '2'
Open the model vdp. The model uses two Integrator blocks.
mdl = "vdp";
open_system(mdl)
The Format parameter for the model specifies whether the Simulink.BlockDiagram.getInitialState function returns a structure or a Simulink.SimulationData.Dataset object. Set the parameter value to Structure.
In the Simulink® Toolstrip, on the Modeling tab, click Model Settings.
In the Configuration Parameters dialog box, select the Data Import/Export pane.
From the Format list, select
Structure.In the Configuration Parameters dialog box, click OK.
Alternatively, use the set_param function to specify the value for the SaveFormat parameter.
set_param(mdl,"SaveFormat","Structure")
Get the structure of block states for the model using the Simulink.BlockDiagram.getInitialState function. The structure contains information for two block states in the signals field, one for each Integrator block.
initStates = Simulink.BlockDiagram.getInitialState(mdl)
initStates = struct with fields:
time: 0
signals: [1×2 struct]
The signals structure for each state contains information about the state, including the initial value currently used in the model and the block path.
initStates.signals(2)
ans = struct with fields:
values: 0
dimensions: 1
label: 'CSTATE'
blockName: 'vdp/x2'
stateName: ''
inReferencedModel: 0
sampleTime: [0 0]
The second block state corresponds to the Integrator block named x2. Set the values field to 2.
initStates.signals(2).values = 2;
Remove the structure in the signals field that includes information about the state for the Integrator block named x1.
initStates.signals(1) = [];
Specify the variable initStates, which includes an initial state value for the Integrator block named x2 as the initial state for the model.
In the Simulink Toolstrip, on the Modeling tab, click Model Settings.
In the Configuration Parameters dialog box, select the Data Import/Export pane.
Select Initial state. Then, in the box, enter
initStates.Click OK.
Alternatively, use the set_param function to configure the LoadInitialState and InitialState parameters.
set_param(mdl,"LoadInitialState","on","InitialState","initStates")
Simulate the model.
out = sim(mdl);
To view the output signals for both Integrator blocks, double-click the Scope block. The initial output value for the Integrator block is the initial state value. For both Integrator blocks, the initial output value and initial state value are both 2.

For the Integrator block named x2, the initial state value of 2 comes from the value of the Initial state parameter. For the Integrator block named x1, the initial state value of 2 is specified in the block parameters.
blk = strcat(mdl,"/x1"); get_param(blk,"InitialCondition")
ans = '2'
Input Arguments
Output Arguments
Version History
Introduced in R2006b