System Dynamics Specifications
This example shows how to constrain the poles of a control system tuned with systune or looptune.
The systune and looptune functions tune the parameters of fixed-structure control systems subject to a variety of time- and frequency-domain requirements. To specify these design requirements, use tuning goal objects.
Closed-Loop Poles
The TuningGoal.Poles goal constrains the location of the closed-loop poles. You can enforce some minimum decay rate
impose some minimum damping ratio
or constrain the pole magnitude to
For example
MinDecay = 0.5; MinDamping = 0.7; MaxFrequency = 10; R = TuningGoal.Poles(MinDecay,MinDamping,MaxFrequency);
constrains the closed-loop poles to lie in the white region below.
viewGoal(R)
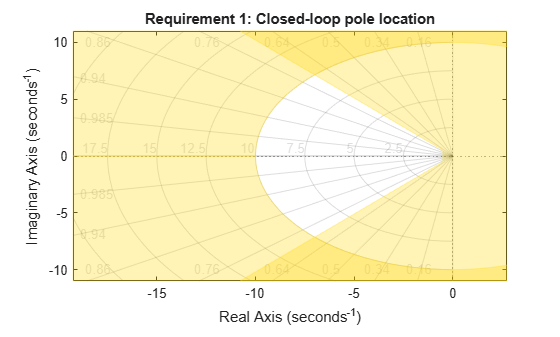
Increasing the MinDecay value results in faster transients. Increasing the MinDamping value results in better damped transients. Decreasing the MaxFrequency value prevents fast dynamics.
Controller Poles
The TuningGoal.ControllerPoles goal constrains the pole locations for tuned elements such as filters and compensators. The tuning algorithm may produce unstable compensators for unstable plants. To prevent this, use the TuningGoal.ControllerPoles goal to keep the compensator poles in the left-half plane. For example, if your compensator is parameterized as a second-order transfer function,
C = tunableTF('C',1,2);you can force it to have stable dynamics by adding the requirement
MinDecay = 0;
R = TuningGoal.ControllerPoles('C',MinDecay);See Also
TuningGoal.Poles | TuningGoal.ControllerPoles