fit
Description
Examples
Load the human activity dataset. Randomly shuffle the data.
load humanactivity; n = numel(actid); rng(1) % For reproducibility idx = randsample(n,n);
For details on the data set, enter Description at the command line.
Define the predictor and response variables.
X = feat(idx,:); Y = actid(idx);
Responses can be one of five classes: Sitting, Standing, Walking, Running, or Dancing.
Dichotomize the response by identifying whether the subject is moving (actid > 2).
Y = Y > 2;
Flip labels for the second half of the dataset to simulate drift.
Y(floor(numel(Y)/2):end,:) = ~Y(floor(numel(Y)/2):end,:);
Initiate a default incremental drift-aware model for classification as follows:
Create an incremental linear SVM model for binary classification. Specify an estimation period of 5000 observations and the SGD solver.
Initiate a default incremental drift-aware model using the incremental linear SVM model as the base learner. Specify a training period of 5000 observations.
baseMdl = incrementalClassificationLinear(EstimationPeriod=5000,Solver="sgd");
idaMdl = incrementalDriftAwareLearner(baseMdl,TrainingPeriod=5000);idaMdl is an incrementalDriftAwareLearner model. All its properties are read-only. By default, incrementalDriftAwareLearner uses the Hoeffding's Bound drift detection method based on moving averages ("hddma").
idaMdl must be fit to data before you can use it to perform any other operations.
Fit the incremental drift-aware model to the training data, in chunks of 50 observations at a time, by using the fit function. At each iteration:
Simulate a data stream by processing 50 observations.
Overwrite the previous incremental model with a new one fitted to the incoming observations.
Store the number of training observations, and the prior probability of whether the subject moved (Y = true) to see how they evolve during incremental training.
% Preallocation numObsPerChunk = 50; nchunk = floor(n/numObsPerChunk); beta1 = zeros(nchunk,1); numtrainobs = zeros(nchunk,1); dstatus = zeros(nchunk,1); statusname = strings(nchunk,1); driftTimes = []; ce = array2table(zeros(nchunk,2),VariableNames=["Cumulative" "Window"]); % Incremental fitting for j = 1:nchunk ibegin = min(n,numObsPerChunk*(j-1) + 1); iend = min(n,numObsPerChunk*j); idx = ibegin:iend; idaMdl = fit(idaMdl,X(idx,:),Y(idx)); idaMdl = updateMetrics(idaMdl,X(idx,:),Y(idx)); beta1(j) = idaMdl.BaseLearner.Beta(1); % Record drift status and classification error statusname(j) = string(idaMdl.DriftStatus); ce{j,:} = idaMdl.Metrics{"ClassificationError",:}; numtrainobs(j) = idaMdl.NumTrainingObservations; if idaMdl.DriftDetected dstatus(j) = 2; driftTimes(end+1) = j; elseif idaMdl.WarningDetected dstatus(j) = 1; else dstatus(j) = 0; end end
idaMdl is an incrementalDriftAwareLearner model object trained on all the data in the stream.
To see how the parameters evolve during incremental learning, plot them on separate tiles.
tiledlayout(2,1) set(groot,DefaultConstantLineLineWidth=1.5); nexttile plot(beta1) ylabel("\beta_1") xline(idaMdl.BaseLearner.EstimationPeriod/numObsPerChunk,"r-.","EstimationPeriod") xline(idaMdl.BaseLearner.EstimationPeriod/numObsPerChunk + driftTimes,"r-.") xlabel('Iteration') xline((idaMdl.BaseLearner.EstimationPeriod+idaMdl.TrainingPeriod)/numObsPerChunk, ... "b-.",{"Estimation +","Training Period"},LabelVerticalAlignment="middle") xline(floor(numel(Y)/2)/numObsPerChunk,"m--","Drift", ... LabelVerticalAlignment="middle") nexttile plot(numtrainobs) ylabel("Number of Training Observations") xline(idaMdl.BaseLearner.EstimationPeriod/numObsPerChunk,"r-.","EstimationPeriod") xline(idaMdl.BaseLearner.EstimationPeriod/numObsPerChunk + driftTimes,"r-.") xlabel("Iteration") xline((idaMdl.BaseLearner.EstimationPeriod+idaMdl.TrainingPeriod)/numObsPerChunk, ... "b-.",{"Estimation +","Training Period"},LabelVerticalAlignment="middle") xline(floor(numel(Y)/2)/numObsPerChunk,"m--","Drift", ... LabelVerticalAlignment="middle")
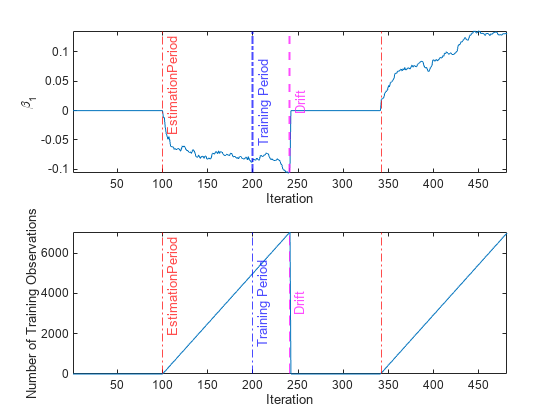
The plot suggests that fit does not fit the model to the data or update the parameters until after the estimation period. After a drift is detected, the function waits for another Mdl.BaseLearner.EstimationPeriod number of observations to fit the new model to data.
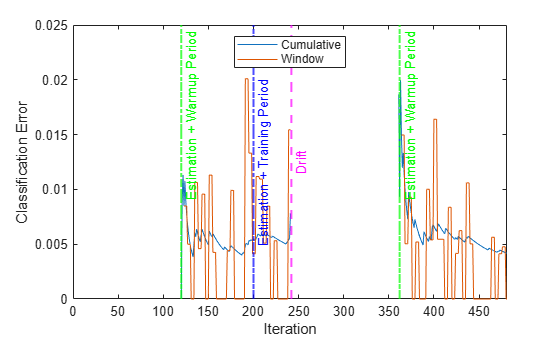
Plot the cumulative and per window classification error. Mark the warmup and training periods, and where the drift was introduced.
figure() h = plot(ce.Variables); xlim([0 nchunk]) ylabel("Classification Error") xlabel("Iteration") xline((idaMdl.BaseLearner.EstimationPeriod+idaMdl.MetricsWarmupPeriod)/numObsPerChunk, ... "g-.","Estimation + Warmup Period") xline((idaMdl.BaseLearner.EstimationPeriod+idaMdl.MetricsWarmupPeriod)/numObsPerChunk+ ... driftTimes,"g-.","Estimation + Warmup Period") xline((idaMdl.BaseLearner.EstimationPeriod+idaMdl.TrainingPeriod)/numObsPerChunk, ... "b-.","Estimation + Training Period",LabelVerticalAlignment="middle") xline(driftTimes,"m--","Drift",LabelVerticalAlignment="middle") legend(h,ce.Properties.VariableNames) legend(h,Location="north")
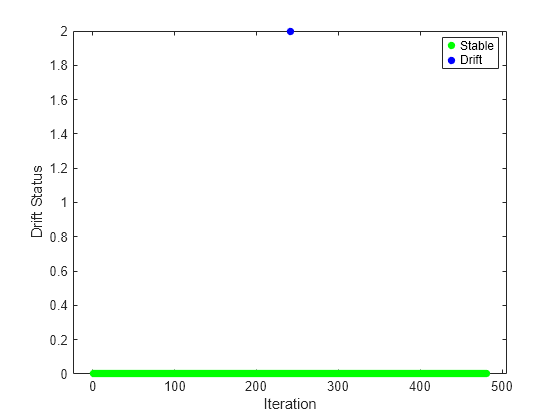
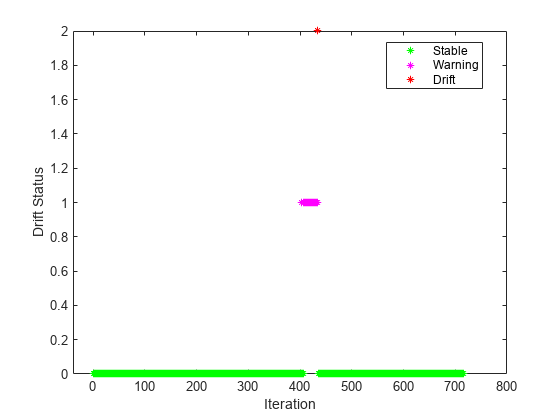
Plot the drift status versus the iteration number.
gscatter(1:nchunk,dstatus,statusname,"gbr","o",5,"on","Iteration","Drift Status","filled")
Predict labels for the second half of the data and check the accuracy of the model updated after the drift.
n = floor(numel(Y)/2); yhat = predict(idaMdl,X(n:end,:)); accuracy = sum(Y(n:end)==yhat)/n
accuracy = 0.9960
Load the robotarm data set. Obtain the sample size n and the number of predictor variables p.
load robotarm
n = numel(ytrain);
p = size(Xtrain,2);For details on the data set, enter Description at the command line.
Introduce an artificial drift to the response variable between observations 2500 and 5000.
Y=ytrain; j=1.25; for i=2500:1250:5000 idx=min(i+1250,5000); Y(i:idx)=ytrain(i:idx)*j; j=j+0.25; end
Initiate an incremental drift-aware model for regression as follows:
Create an incremental linear SVM model for regression. Specify an estimation period of 500 observations and the SGD solver.
Create an incremental drift detector for continuous data.
Initiate an incremental drift-aware model using the incremental linear SVM model as the base learner and the drift detector you created. Specify a training period of 2000.
baseMdl = incrementalRegressionLinear(EstimationPeriod=500,Solver="sgd",MetricsWarmUpPeriod=750); ddetector = incrementalConceptDriftDetector("hddma",InputType="continuous",Alternative="greater"); idaMdl = incrementalDriftAwareLearner(baseMdl,DriftDetector=ddetector,TrainingPeriod=2000);
idaMdl is an incrementalDriftAwareLearner model. All its properties are read-only.
Preallocate the number of variables in each chunk and number of iterations for creating a stream of data.
numObsPerChunk = 10; nchunk = floor(n/numObsPerChunk);
Preallocate the variables for tracking the drift status and drift time, and storing the regression error and number of training observations.
dstatus = zeros(nchunk,1); statusname = strings(nchunk,1); driftTimes = []; ei = array2table(nan(nchunk,2),VariableNames=["Cumulative","Window"]); numtrainobs = zeros(nchunk,1);
Perform incremental learning on the rest of the data by using the updateMetrics and fit functions. At each iteration:
Simulate a data stream by processing 10 observations at a time.
Call
updateMetricsto update the cumulative and window classification error of the model given the incoming chunk of observations. Overwrite the previous incremental model to update the losses in theMetricsproperty. Note that the function does not fit the model to the chunk of new data. Specify the observation orientation.Call
fitto fit the model to the incoming chunk of observations. Overwrite the previous incremental model to update the model parameters. Specify the observation orientation.Store the regression error and number of training observations.
rng(123) % For reproducibility for j = 1:nchunk ibegin = min(n,numObsPerChunk*(j-1) + 1); iend = min(n,numObsPerChunk*j); idx = ibegin:iend; idaMdl = updateMetrics(idaMdl,Xtrain(idx,:),Y(idx),ObservationsIn="rows"); ei{j,:} = idaMdl.Metrics{"EpsilonInsensitiveLoss",:}; idaMdl = fit(idaMdl,Xtrain(idx,:),Y(idx),ObservationsIn="rows"); numtrainobs(j) = idaMdl.NumTrainingObservations; statusname(j) = string(idaMdl.DriftStatus); if idaMdl.DriftDetected dstatus(j) = 2; driftTimes(end+1) = j; elseif idaMdl.WarningDetected dstatus(j) = 1; else dstatus(j) = 0; end end
idaMdl is an incrementalDriftAwareModel object trained on all the data in the stream.
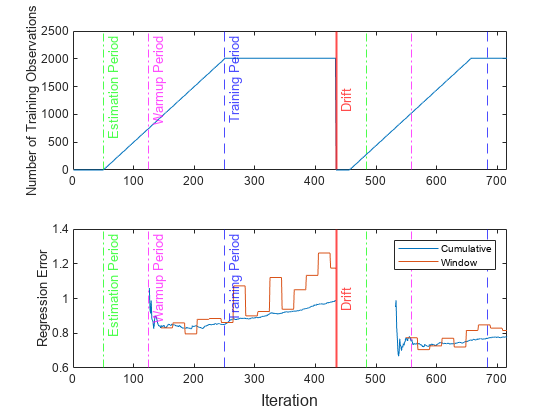
Plot a trace plot of the number of training observations and the performance metrics. Mark the times for estimation period, warm up metric period, and training period.
t = tiledlayout(2,1); nexttile plot(numtrainobs) xline(idaMdl.BaseLearner.EstimationPeriod/numObsPerChunk,"g-.","Estimation Period") xline((idaMdl.BaseLearner.EstimationPeriod+idaMdl.MetricsWarmupPeriod)/numObsPerChunk,"m-.","Warmup Period") xline((idaMdl.BaseLearner.EstimationPeriod+idaMdl.TrainingPeriod)/numObsPerChunk,"b--","Training Period") xline(idaMdl.BaseLearner.EstimationPeriod/numObsPerChunk+driftTimes,"g-.") xline((idaMdl.BaseLearner.EstimationPeriod+idaMdl.MetricsWarmupPeriod)/numObsPerChunk+driftTimes,"m-.") xline((idaMdl.BaseLearner.EstimationPeriod+idaMdl.TrainingPeriod)/numObsPerChunk+driftTimes,"b--") xline(driftTimes,"r","Drift",LabelVerticalAlignment="middle",LineWidth=1.5) xlim([0 nchunk]) ylabel("Number of Training Observations") nexttile plot(ei.Variables) xline(idaMdl.BaseLearner.EstimationPeriod/numObsPerChunk,"g-.","Estimation Period") xline((idaMdl.MetricsWarmupPeriod+idaMdl.BaseLearner.EstimationPeriod)/numObsPerChunk,"m-.","Warmup Period") xline((idaMdl.BaseLearner.EstimationPeriod+idaMdl.TrainingPeriod)/numObsPerChunk,"b--","Training Period") xline(idaMdl.BaseLearner.EstimationPeriod/numObsPerChunk+driftTimes,"g-.") xline((idaMdl.BaseLearner.EstimationPeriod+idaMdl.MetricsWarmupPeriod)/numObsPerChunk+driftTimes,"m-.") xline((idaMdl.BaseLearner.EstimationPeriod+idaMdl.TrainingPeriod)/numObsPerChunk+driftTimes,"b--") xline(driftTimes,"r","Drift",LabelVerticalAlignment="middle",LineWidth=1.5) xlim([0 nchunk]) legend(ei.Properties.VariableNames,Location="northeast") ylabel("Regression Error") xlabel(t,"Iteration")
Plot the drift status versus the iteration number.
figure() gscatter(1:nchunk,dstatus,statusname,'gmr','*',5,'on',"Iteration","Drift Status")
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
References
Version History
Introduced in R2022b
See Also
predict | perObservationLoss | incrementalDriftAwareLearner | updateMetrics | updateMetricsAndFit | loss