equationsToMatrix
Convert linear equations to matrix form
Description
Examples
Convert a system of linear equations to matrix form. equationsToMatrix automatically detects the variables in the equations by using symvar. The returned coefficient matrix follows the variable order determined by symvar.
syms x y z eqns = [x+y-2*z == 0, x+y+z == 1, 2*y-z == -5]; [A,b] = equationsToMatrix(eqns)
A =
b =
vars = symvar(eqns)
vars =
You can change the arrangement of the coefficient matrix by specifying other variable order.
vars = [x,z,y]; [A,b] = equationsToMatrix(eqns,vars)
A =
b =
Convert a linear system of equations to the matrix form by specifying independent variables. This is useful when the equations are only linear in some variables.
For this system, specify the variables as [s t] because the system is not linear in r.
syms r s t eqns = [s-2*t+r^2 == -1 3*s-t == 10]; vars = [s t]; [A,b] = equationsToMatrix(eqns,vars)
A =
b =
Return only the coefficient matrix of the equations by specifying a single output argument.
syms x y z eqns = [x+y-2*z == 0, x+y+z == 1, 2*y-z == -5]; vars = [x y z]; A = equationsToMatrix(eqns,vars)
A =
Consider the following system of linear equations that are functions of time:
Declare the system of equations.
syms x(t) y(t) z(t) u(t) v(t) eqn1 = 2*x + y + z == 2*u; eqn2 = -x + y - z == v; eqn3 = x + 2*y + 3*z == -10; eqn = [eqn1; eqn2; eqn3]
eqn(t) =
Specify the independent variables , , and in the equations as a symbolic vector vars. Use the equationsToMatrix function to convert the system of equations into the matrix form.
vars = [x(t); y(t); z(t)]; [A,b] = equationsToMatrix(eqn,vars)
A =
b =
Solve the matrix form of the equations using the linsolve function.
X = linsolve(A,b)
X =
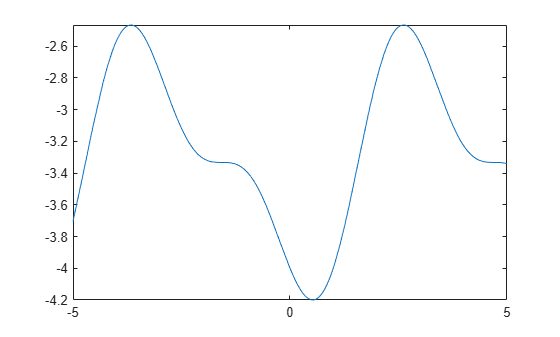
Evaluate the solution for the functions and . Plot the solution.
zSol = subs(X(3),[u(t) v(t)],[cos(t) sin(2*t)])
zSol =
fplot(zSol)
Input Arguments
Output Arguments
More About
Version History
Introduced in R2012b